Robotics
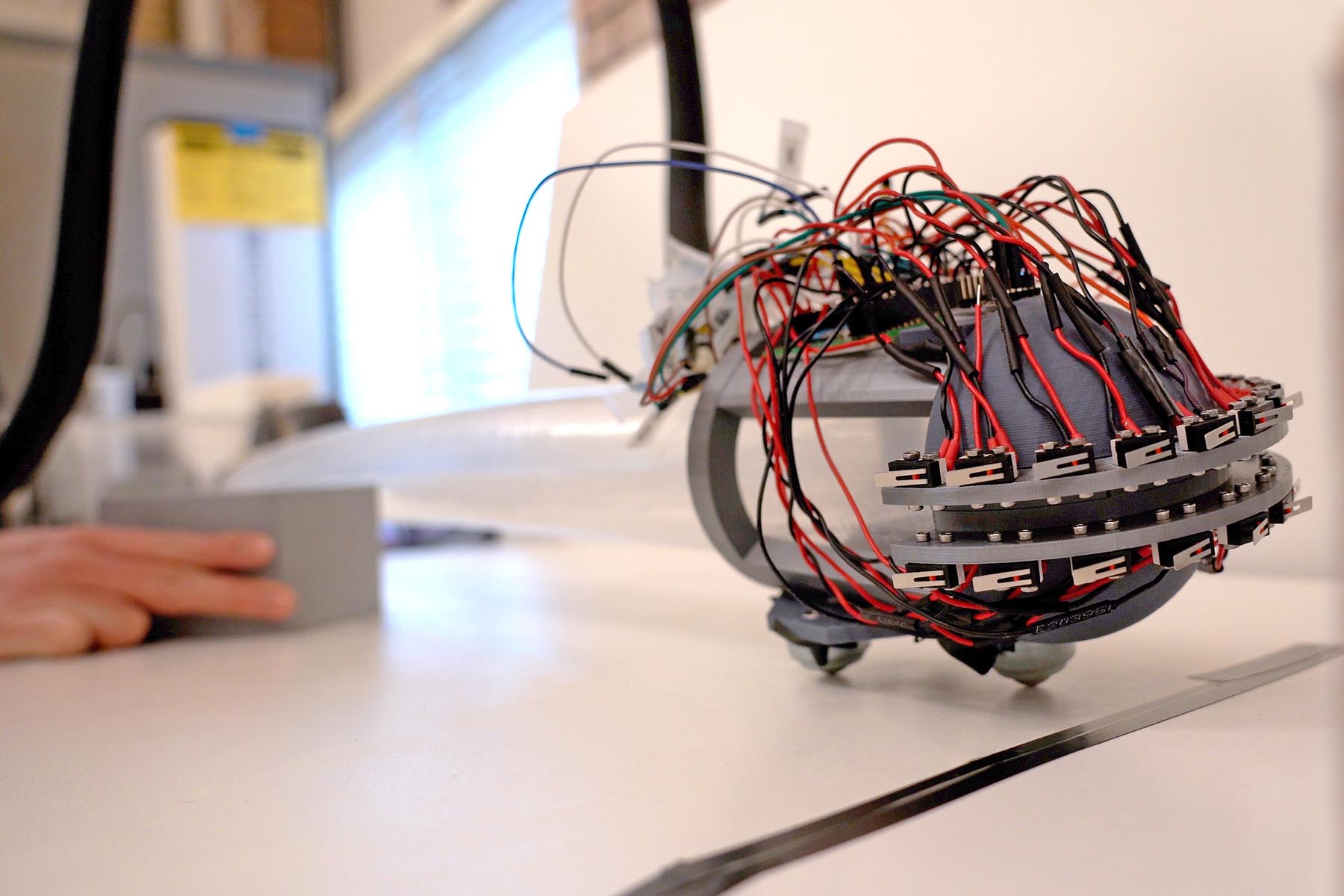
21st century robots are just as likely to be hovering in the air, or swimming through someone’s bloodstream, as working in an automotive factory. That’s why Purdue researchers pursue robotics on all fronts: manufacturing, biomedicine, design, nanotechnology, and more. From large scale automation, such as in manufacturing; to microrobots moving individual cells; every aspect of robotics is explored at Purdue. Especially important is human-computer interaction, so that people from every background can utilize the newest technology in the most productive way.





Faculty in Robotics
- Adaptive structures
- Mechanical metamaterials
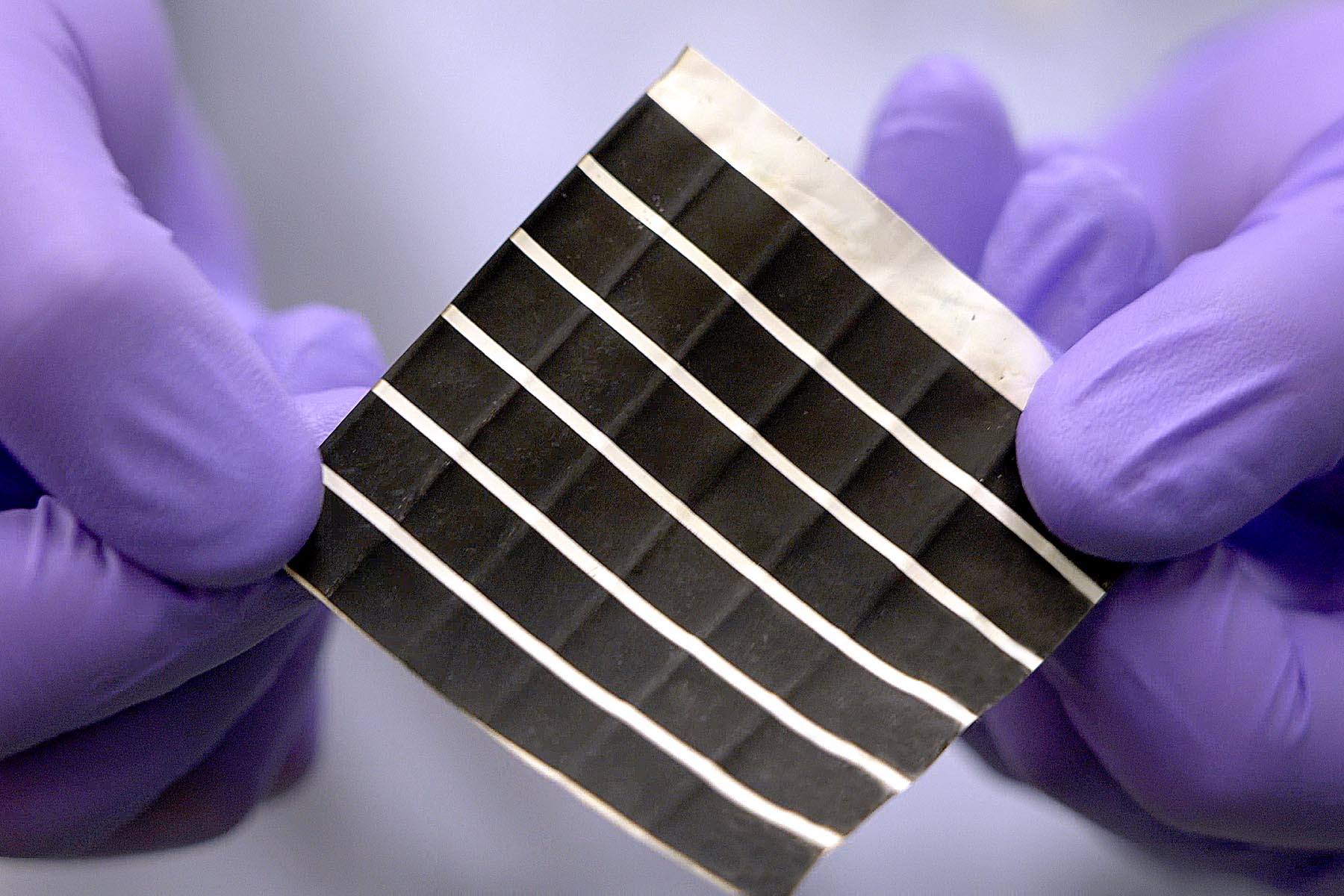
- Robotic materials
- Programmable structures
- Multistable structures
- Structural nonlinearity
- Elastic instabilities
- Structural dynamics
- Nonlinear vibrations
- Growing robots
- Soft robotics
- Bioinspired systems
- Wearable robots
- Haptics
- Soft matter
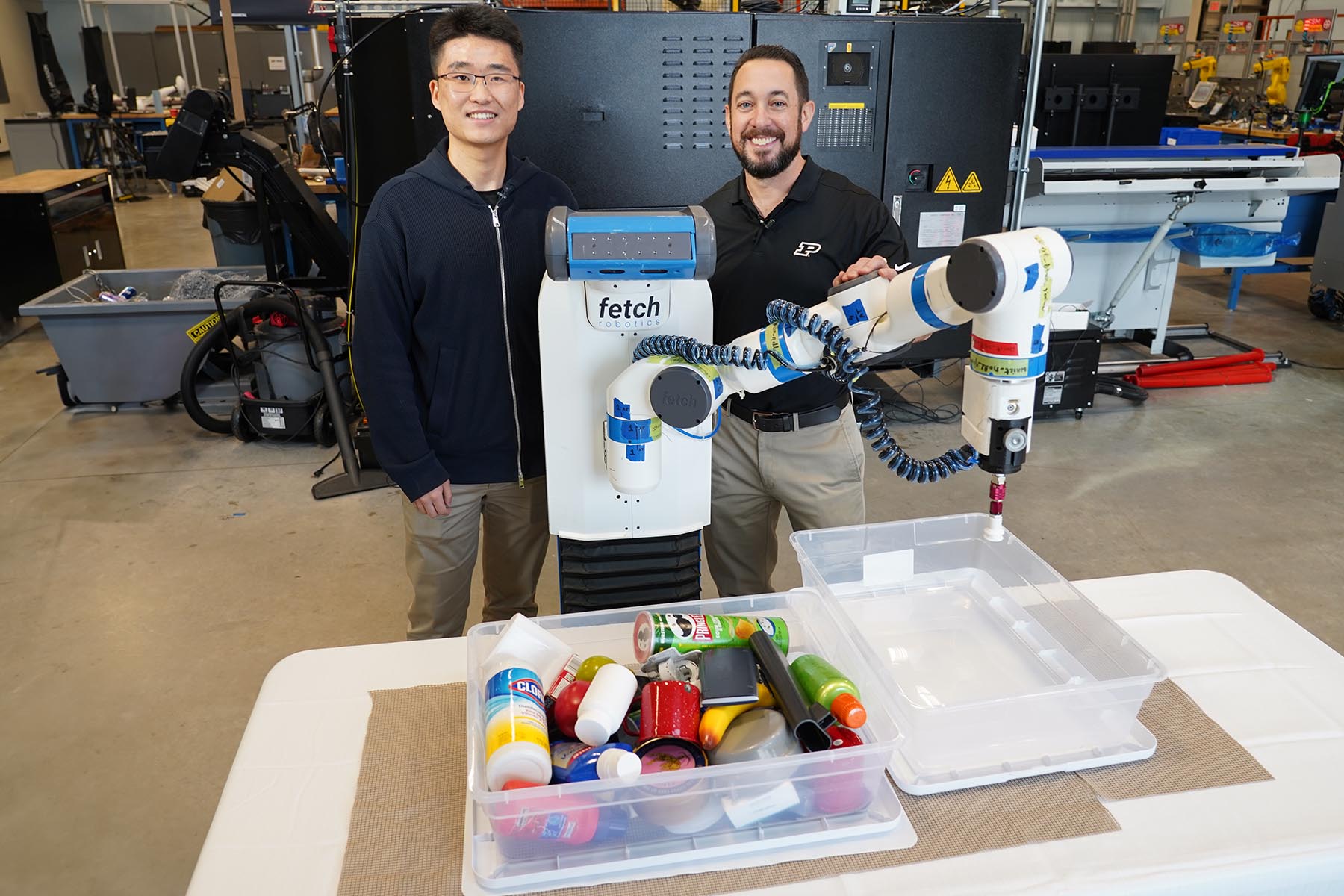
- Multi-scale robotic manipulation and assembly
- Mobile micro/nano robotics
- Micro/nano aerial vehicles
- Micro-Bio robotics
- Mechatronics
- MEMS/NEMS
- Automation for the life sciences
- Bio-inspired and mechanically adaptive electronics
- Multimaterial additive fabrication
- Soft actuators (artificial muscles)
- Wearable actuators (haptics)
- Polymer design and polymer physics
- Deformation sensors and transistors
- Principles of aerial and aquatic locomotion in animals
- Experimental fluid mechanics
- Dynamics
- Control
- Bio-inspired robotics
- Biologically inspired micro aerial vehicles and underwater robots
- Bio-sensing and sensor fusion algorithms
- Structural Dynamics and Control
- Cyber-physical Systems
- Machine Vision
- Real-time Hybrid Simulation
- Damage Detection and Structural Condition Monitoring
- Cyberinfrastructure Development
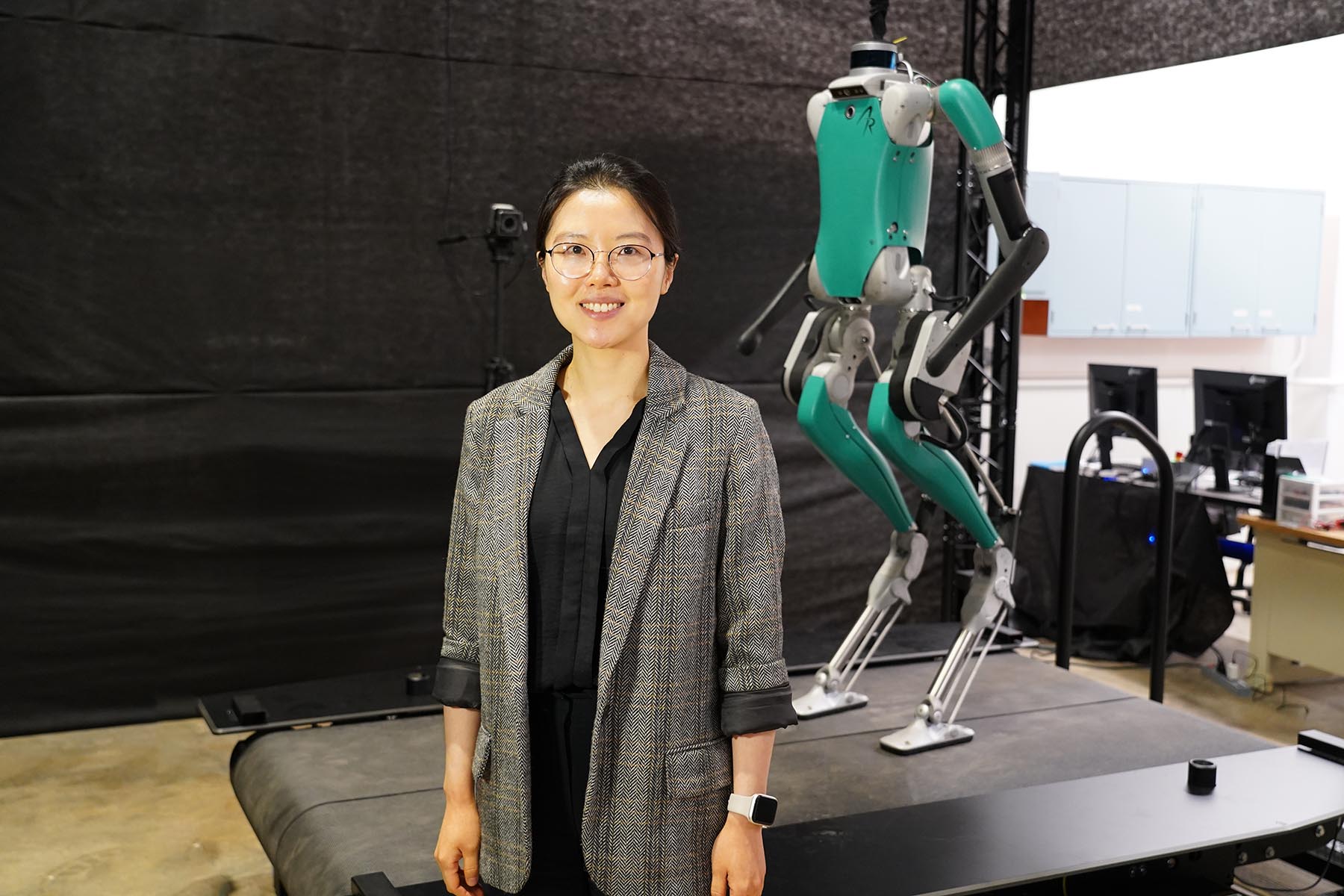
- Legged locomotion
- Humanoid and quadrupedal robots
- Wearable robotics
- Hybrid dynamical systems
- Control
- State estimation
- Dynamics
- Physics-based and data-driven modeling of dynamical systems
- Control theory, analysis, and design
- Control co-design
- Applications: human-machine teaming, multi-phase thermal-fluid systems, manufacturing processes, vehicle electrification
- Robotics
- Marine Robotics
- Unmanned Systems
- Energy Autonomy
- Systems Design
- Coordination and Controls
- Human Skill and Augmentation
- Collaborative and Hybridized Intelligence
- Deep Learning of Shapes and Computer Vision
- Human-Robot-Machine Interactions
- Making to Manufacturing (M2M)
- Factory of the Future and Robotics
- Manufacturing Productivity
- Vehicle Chassis Control Systems
- Vehicle Dynamics
- Autonomous Vehicles
- Human Driver Dynamics
- Adaptive and robust control
- Nonlinear control
- Precision control of mechanical systems
- Vehicle control
- Robotics