Fidget-controlled robots show the power of metastability
Fidget poppers are an example of “bistability,” as the popped circles rest in one of two stable states. Purdue University researchers have taken this idea to its extreme, building robots that can be preprogrammed and controlled using just the physical properties of these fidget poppers.
“Bistability is an important concept found in nature,” said Andres Arrieta, the Doug and Cathy Field Rising Star Professor of Mechanical Engineering. “Earwigs, for example, have bistable, foldable wings that snap to an open state with very little energy. The Venus flytrap also closes its leaves using bistable mechanisms. We are working to make programmable structures inspired from this bistability.”
Arrieta’s team has explored many uses for this bistability, from shape-shifting furniture to morphing aircraft wings. But they’ve zeroed in on one mechanism in particular: the fidget popper. This oddly satisfying metamaterial has the potential to store energy, perform work and act as a mechanical computer. Arrieta’s team even built a giant-size fidget sheet to demonstrate the concept to new students.
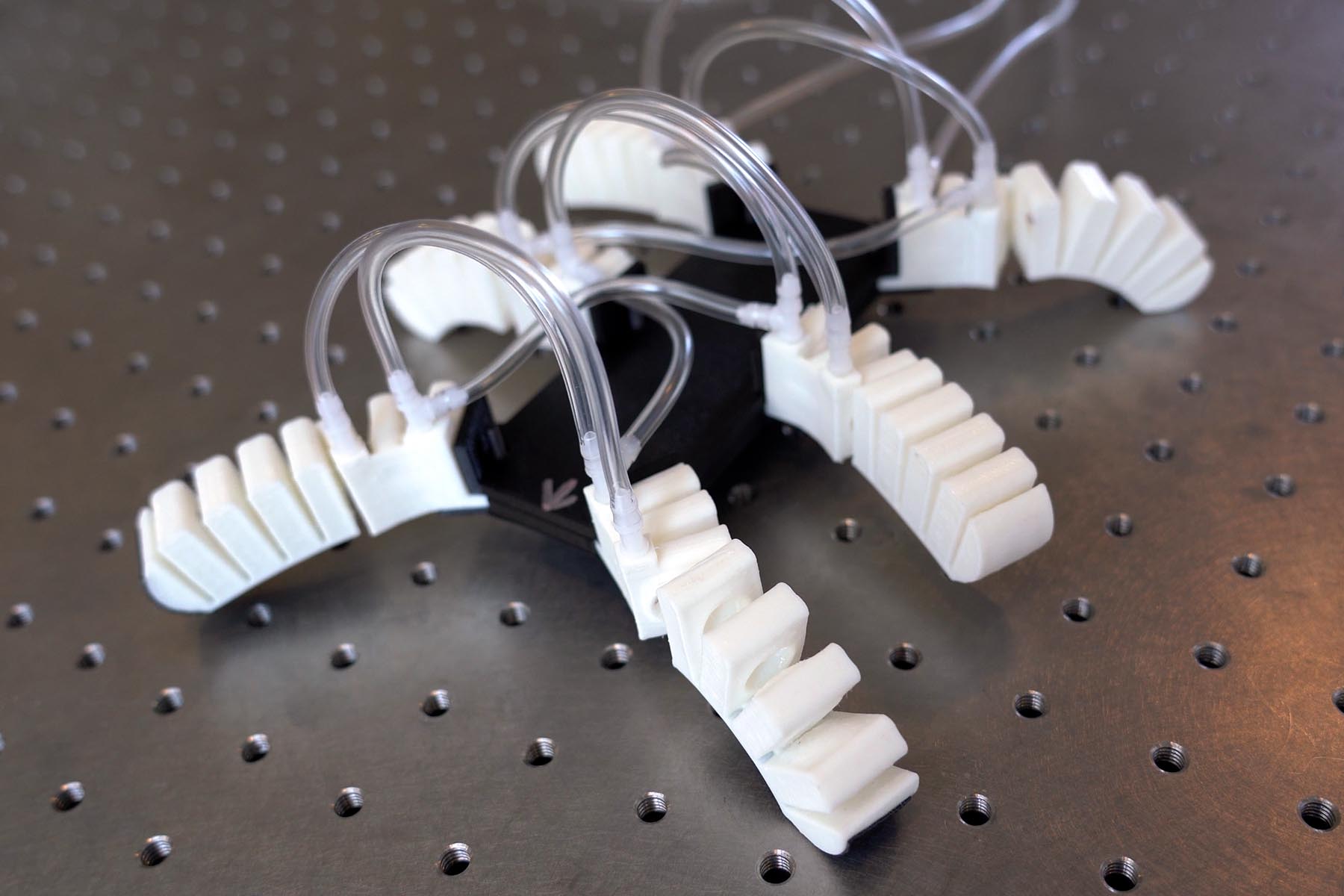
But to make the most of their power, you’ve got to harness and control them. “By putting several of these domes together, we can create soft robots like grippers and walkers,” said Juan Osorio (PhD ’25), now a postdoctoral researcher in Arrieta’s lab. “We can specify the distance for each dome’s stable state, so we can accurately predict what the curvature of the final gripper arm will be, depending on how many of the domes we actuate.”
The “domes” are made of 3D-printed thermoplastic polyurethane, an elastic material. By specifying the material, Osorio can dial in exactly how far the domes stick out when actuated with compressed air.
3D-printing the domes also enables “metastability,” which is the secret sauce of this new generation of soft robots.
“Metastable domes are quite interesting,” he said. “When we press these domes, they stay stable for a brief time period, but then snap back automatically. This allows us to program a time-dependent response in our systems using the geometry of these metastable domes.”
Their research into these new control systems has been published in Advanced Science. They developed these robots at Purdue's Herrick Labs.
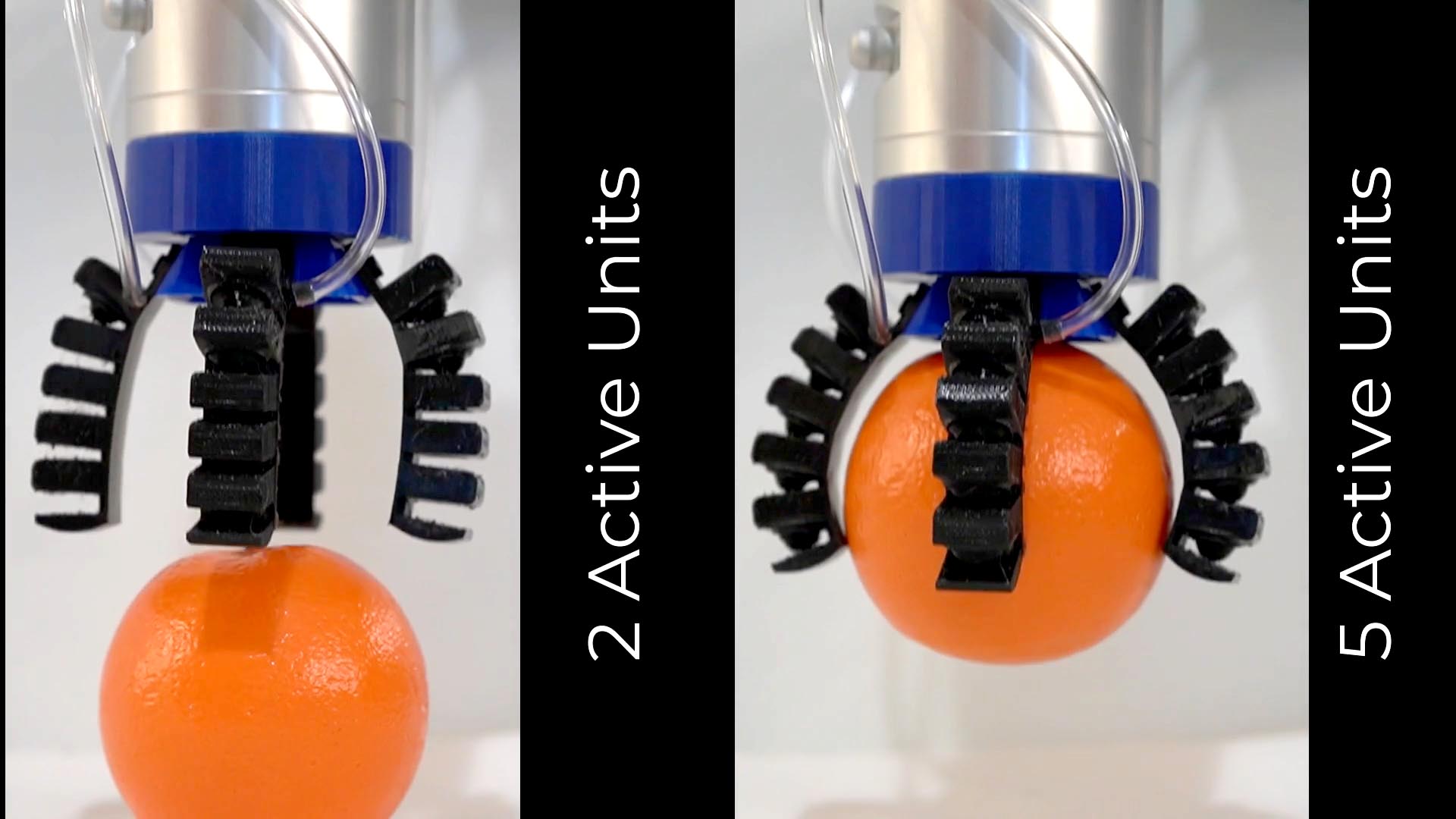
Osorio and his team built two kinds of soft robots to demonstrate: a gripper and a walker. With the gripper, Osorio used the predictability of the bistable domes to enable a computer-free method of sensing and classifying the size and weight of objects.
“The robot attempts to lift the object with only one set of domes actuated,” Osorio said. “If it can’t grab it, then it actuates the second set, and so on. Because we know the exact dimensions of the aperture when actuated, we can determine the size of the object using just the geometry of the domes. Then the metastable domes revert back after a set period of time, causing the gripper to let go of the object.”
The walker robot is a bit more complex, with a mix of metastable and bistable domes at different angles. By placing them in a certain order and actuating them, the robot can move forward or turn left and right. “We aren’t sending different commands through a computer; this is all preprogrammed into the robot’s legs using just the geometry of the structure,” Osorio said. “The metastability gives us a control authority we couldn’t have using just bistability alone.”
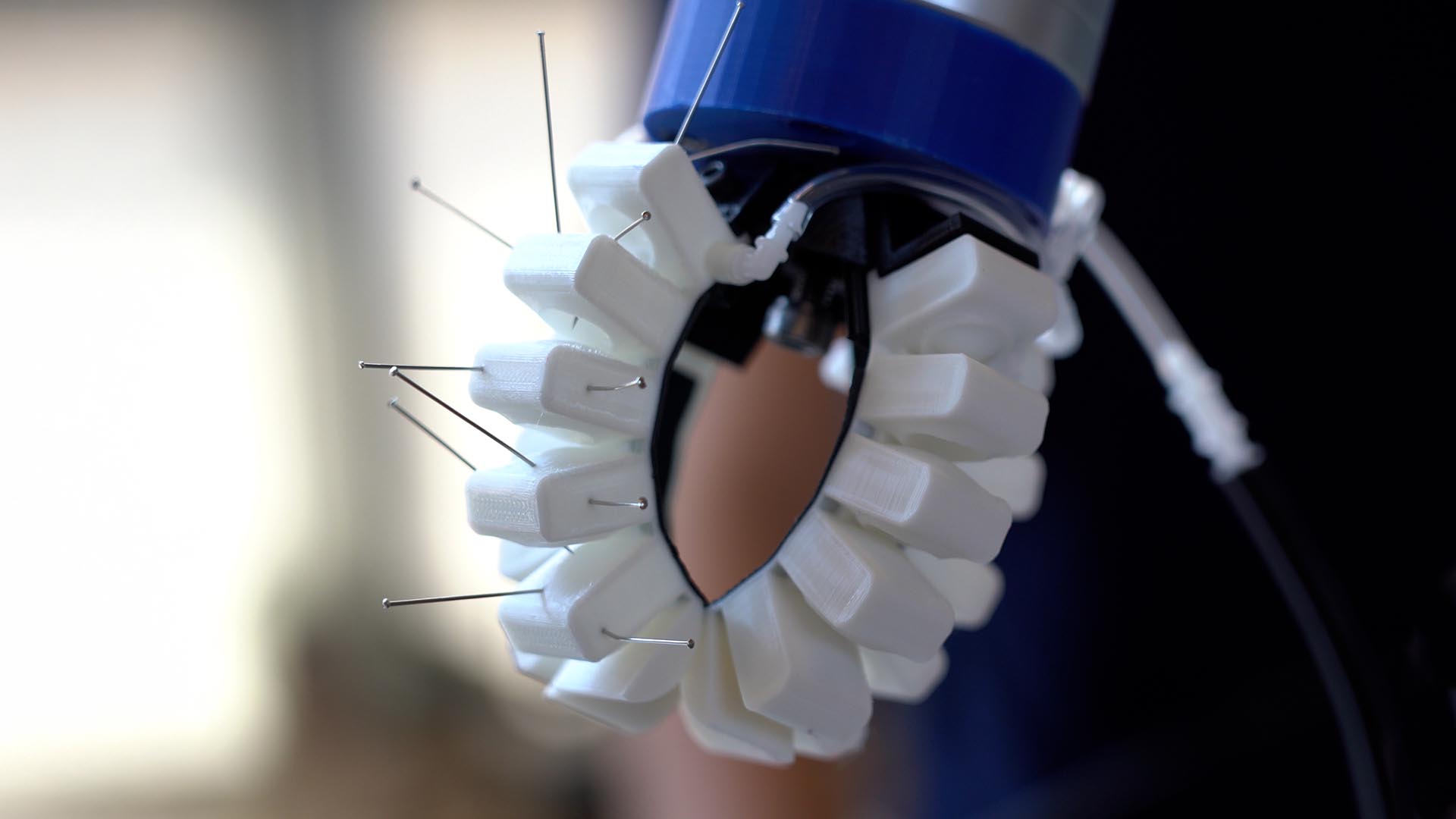
It also offers robustness. Osorio tested the damage tolerance of the gripper arms by stabbing the domes with numerous needles, severely degrading the air pressure actuation system. Yet because of the physical properties of the domes, the gripper arms continued to function and hold their shape.
The end goal of this research is to create robots that can function without the need for onboard computers, batteries, sensors or other electronic aids.
“We want to build robots that can function in difficult environments,” Osorio said. “It’s tough to rely on electronics in an environment like space, or a nuclear reactor, or the bottom of the ocean. Physical systems like our metastable robots can be a great alternative to perform tasks in hard environments.”
Source: Andres Arrieta, arrieta@purdue.edu
Writer: Jared Pike, jaredpike@purdue.edu, 765-496-0374
Embodying control in soft multistable robots from morphofunctional co-design
Juan C. Osorio, Jhonatan S. Rincon, Harith Morgan, Andres F. Arrieta
https://doi.org/10.1002/advs.202503206
ABSTRACT: Soft robots are distinguished by their flexibility and adaptability, allowing them to perform nearly impossible tasks for rigid robots. However, controlling their behavior is challenging due to their nonlinear material response and infinite degrees of freedom. A potential solution to these challenges is to discretize their infinite-dimensional configuration space into a finite but sufficiently large number of functional modes with programmed dynamics. A strategy is presented for co-designing the desired tasks and morphology of pneumatically actuated soft robots with multiple encoded stable states and dynamic responses. This approach introduces a general method to capture the soft robots’ response using an energy-based analytical model, the parameters of which are obtained using Recursive Feature Elimination. The resulting lumped-parameter model enables the inverse co-design of the robot’s morphology and planned tasks by embodying specific dynamics upon actuation. This approach’s ability to explore the configuration space is shown by co-designing kinematics with optimized stiffnesses and time responses to obtain robots capable of classifying the size and weight of objects and displaying adaptable locomotion with minimal feedback control. This strategy offers a framework for simplifying the control of soft robots by exploiting the mechanics of multistable structures and embodying mechanical intelligence into soft material systems.