ACS PEI: TScan developed in Lyles School tracks road activity for improving safety of conventional and automated vehicles
Sponsored by the Indiana Department of Transportation via the Joint Transportation Research Program (JTRP), TScan combines modern sensing technology and a new safety evaluation theory. The safety theory and the concept of the system were developed by Lyles School of Civil Engineering Professor Andrew Tarko, who also serves as director of the Center for Road Safety at Purdue. Mario Romero, research scientist, and Vamsi Bandaru, graduate research assistant, were instrumental CE team members involved in the hardware and software development.
Tarko’s book, “Measuring Road Safety Using Surrogate Events,” outlines the theory, which has been validated and published in journals and presented at international conferences.
TScan’s measurements can be used to estimate the propensity for traffic accidents at pinpointed intersections. Current research is aimed at developing trailer-based units and a companion method of rapid safety measurement made in several days of traffic observations compared to several years of reported crashes. This advancement in measuring safety is particularly timely when the presence of automated and connected vehicles (CAVs) is expected to start growing soon due to their profound and rapid effect on safety. The obtained solutions are applicable today in portable units to support rapid analysis of traffic operations and safety. These solutions also may find use in future fixed roadside installations to track road users’ trajectories (paths and motion) and to share them with CAVs to improve their safety and efficiency.

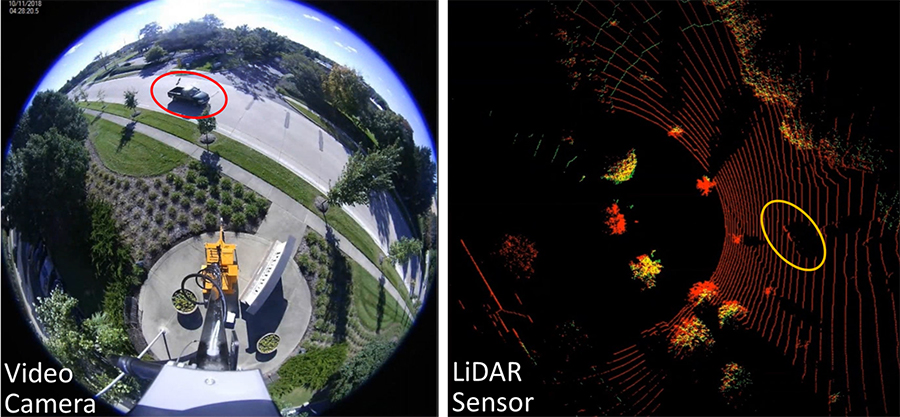
TScan uses Light Detection and Ranging (LiDAR) technology with a three-dimensional laser scanning unit complemented with cameras for data collection. TScan is capable of tracking all types of road users —namely pedestrians, bicycles, cars and trucks —and classifies them with high accuracy. The results of TScan are stored in a custom format to enable the use of a wide variety of applications.
“This will be the first example of a successfully implemented method of traffic conflicts —commonly known as near-misses—in safety management,” Tarko said. “The first concept was proposed in the 1960s by General Motors. It took nearly 60 years of attempts and modifications in many countries, and Purdue may be the first to succeed.”
Two TScan units are expected to be finalized this year, Tarko said. Video-based tracking solutions have been the most frequently tested way to collect information at intersections, but Purdue’s research has shown that LiDAR is more accurate, particularly in challenging conditions such as adverse weather, darkness, or traffic congestion. In addition, their cost is dropping fast while performance improves.
Video-based systems are only effective as long as ambient light is strong, and while advancements in image processing and artificial intelligence have dramatically increased the usability of cameras, they cannot function as effectively as LiDAR in all weather conditions. Setting up and calibrating a multi-camera system takes considerable time and effort, which makes its use at multiple locations troublesome. In comparison, TScan is built for portability and a quick set-up time in the field.
The tracking capabilities developed for TScan also are designed for compatibility with CAVs. Roadside LiDAR infrastructure can provide information about other road users that are not in the field of view of CAVs approaching an intersection. This may reduce the blind spot problem experienced by CAVs and enhance their perception of the intersection environment.
Some of the other advantages of the current trailer-based TScan system include:
• Easy to set up by a single operator
• Scalable by connecting several units in one system
• Sustainable for several days with limited supervision
• Real-time data processing
• Versatile data useful for a wide range of operational analyses
• Sufficient accuracy for conflicts
• Cost effectiveness
For more on the Purdue Engineering Initiative in Autonomous and Connected System