Electromechanical and Electromagnetic Component Design
One of Purdue’s most prevalent research thrusts involves the design of electromagnetic and electromechanical components including electric motors, generators, transformers, and inductors. While most designers rely on a highly manual (and sometimes rather ad-hoc) design approach, Purdue researchers have focused on a highly rigorous and systematic approach in which the design problem and its constraints are formulated into a formal multi-objective optimization problem. Since this problem is non-linear, non-convex, discontinuous, and features a mixed search space, it is a formidable problem from a computational perspective. However, Purdue researchers have been able to successfully solve such problems using a variety of evolutionary computational techniques. This has been possible through a combined expertise in magnetic materials, computationally efficient magnetic analysis techniques such as magnetic equivalent circuit analysis, electric machinery and magnetic devices, and evolutionary computation techniques. Purdue’s Power Magnetics Laboratory, Energy Conversion Research Laboratory, Genetic Optimization Processing Array, and Genetic Optimization System Engineering Tool all support this work.
Purdue researchers have developed design codes for devices including surface mounted permanent magnetic synchronous machines [1-2], wound-rotor synchronous machines, claw-pole automotive alternators, switched reluctance machines, interphase transformers, and a variety of inductors for power electronics applications [3].
As an example, application, consider the design of a drive motor for NASA’s Chariot, a next generation lunar rover.

NASA's Chariot Lunar Rover
Because of the cost of delivering payload to the moon, mass of the propulsion drive motors is critical. Also, because of limited energy resources, the minimization of loss is also critical. Purdue evolutionary computing codes were used to determine the Pareto-Optimal front of designs for this application. In this case, this front consists of a set of designs in which mass cannot be reduced without increasing loss. The resulting Pareto-Optimal front is shown below. Therein, three fronts are shown – one for 10-pole machines, one for 20-pole machines, and one for 40-pole machines.
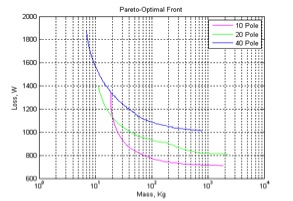
Pareto-Optimal Front for NASA Chariot Propulsion Drive Motor
The Pareto-Optimal front informs the designer of the best trade-off between competing objectives, in this case between mass and loss. Each point in the curve above represents a unique machine design. For example, the least massive 20-pole machine is illustrated below:
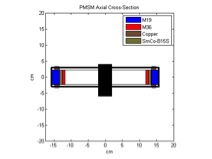
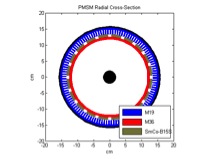
Sample 20-Pole Design
Besides NASA, Purdue researchers have applied their codes to Army Man Portable Generators, to a variety of Naval applications, and to several industrial vendors. A variety of equipment has been successfully build and tested based on this approach. Purdue researchers are active in increasing the scope, accuracy, and applications of these design codes leading to less expensive and more energy efficient designs through a broad range of applications.
References
[1] S.D. Sudhoff, J. Cale, B. Cassimere, M. Swinney, “Genetic Algorithm Based Design of a Permanent Magnet Synchronous Machine,” 2005 International Electric Machines and Drives Conference, San Antonio, Texas, May 15-18, 2005
[2] B.N. Cassimere, S.D. Sudhoff, “Population Based Design of Permanent Magnet Synchronous Machines,” IEEE Transactions on Energy Conversion, vol. 24, no. 2, pg(s) 347-357. June 2009
[3] J.Cale, S.D. Sudhoff, R.R. Chan, “Ferrimagnetic Inductor Design using Population-Based Design Algorithms,” IEEE Transactions on Magnetics. vol. 45, no. 2, pg(s) 726-734. February 2009.