by Mayank Patel | May 24, 2026 | 2026, Asim Unmesh, Karthik Ramani, Mayank Patel, Rahul Jain, Recent Publications
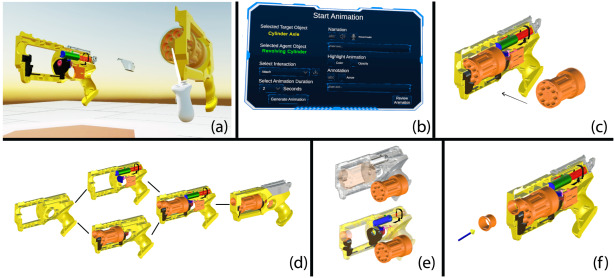
Mechanical assembly animations are essential for conveying complex technical procedures, especially in instructional and training contexts. With the growing adoption of immersive Virtual Reality (iVR) in education and industry, there is a critical need for tools that...
by Convergence Design Lab Admin | Apr 13, 2026 | 2026, Chenfei Zhu, Shao-Kang Hsia, Xinyi Wang, Xiyun Hu, Zhengzhe Zhu, Ziyi Liu
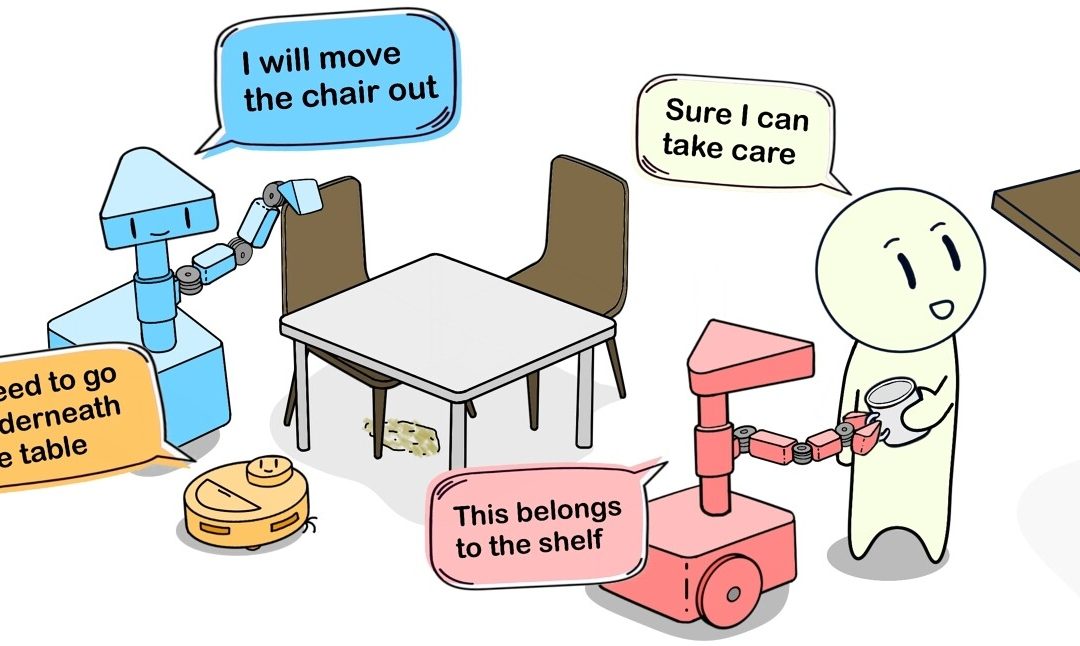
As domestic robots become prevalent, households will involve multiple robots with different capabilities, requiring people to coordinate and collaborate with several robots daily. This demands understanding key human–multi-robot interaction that shapes human...
by Xiyun Hu | Apr 13, 2026 | 2026, Chenfei Zhu, Dizhi Ma, Karthik Ramani, Rahul Jain, Shao-Kang Hsia, Xiyun Hu
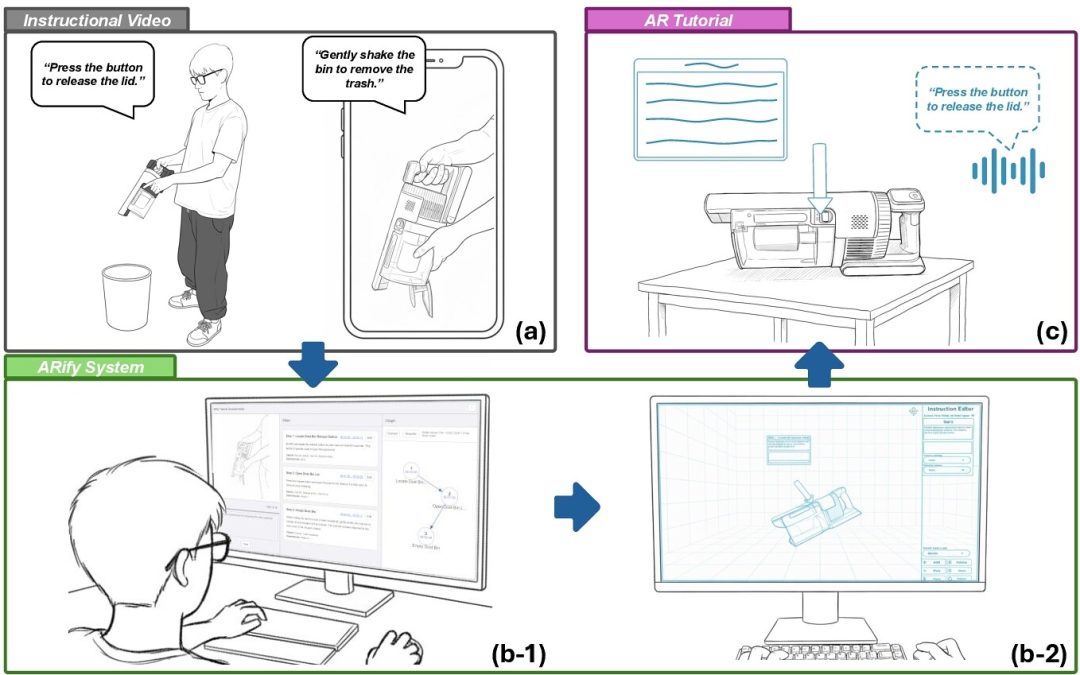
Augmented Reality (AR) tutorials enhance procedural task learning by providing situated, step-by-step guidance. Yet, creating such tutorials requires AR authoring expertise, posing a significant entry barrier. To lower this barrier, we introduce ARify, an authoring...
by Runlin Duan | Apr 13, 2026 | 2026, Chenfei Zhu, Dizhi Ma, Karthik Ramani, Runlin Duan, Xiyun Hu, Yuzhao Chen, Ziyi Liu
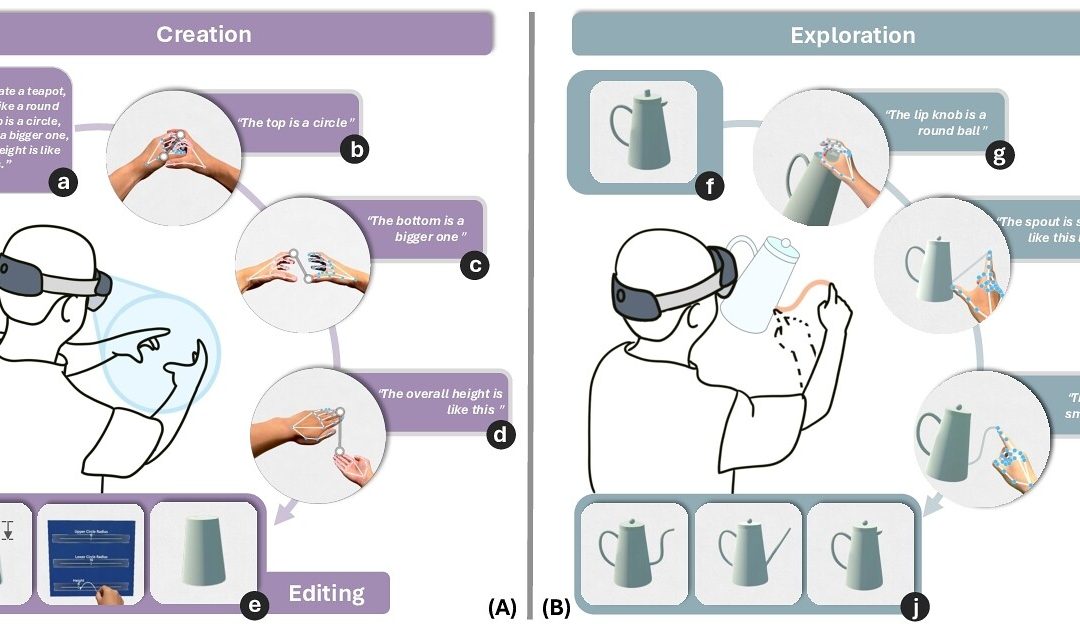
Parametric modeling is a prevailing 3D modeling approach in design, architecture, and engineering. The emergence of multimodal large language models (LLMs) brings a new opportunity to lower the entry barriers to this powerful tool. However, describing 3D geometries...
by Ziyi Liu | Apr 13, 2026 | 2026, Karthik Ramani, Runlin Duan, Xiyun Hu, Yuzhao Chen, Zhengzhe Zhu, Ziyi Liu
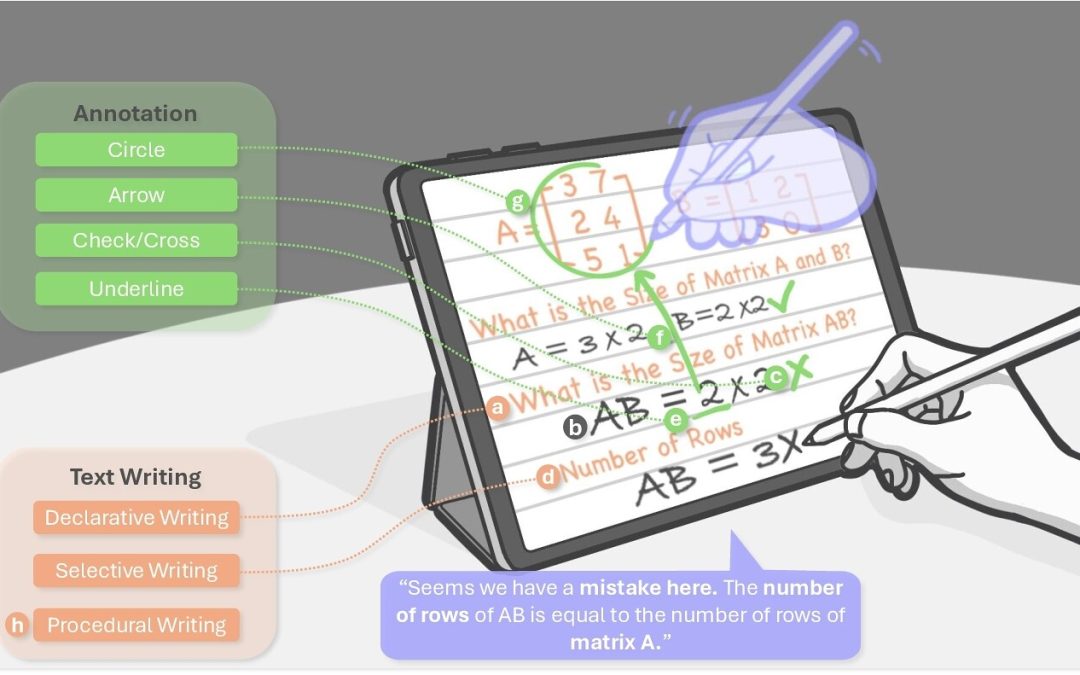
Real-time handwriting interactions between tutors and students —where tutors observe individual problem-solving processes, provide personalized annotations, and adapt explanations based on students’ work—are fundamental to effective STEM tutoring. However, scaling...
by Dizhi Ma | Apr 13, 2026 | 2026, Dizhi Ma, Karthik Ramani, Xiyun Hu
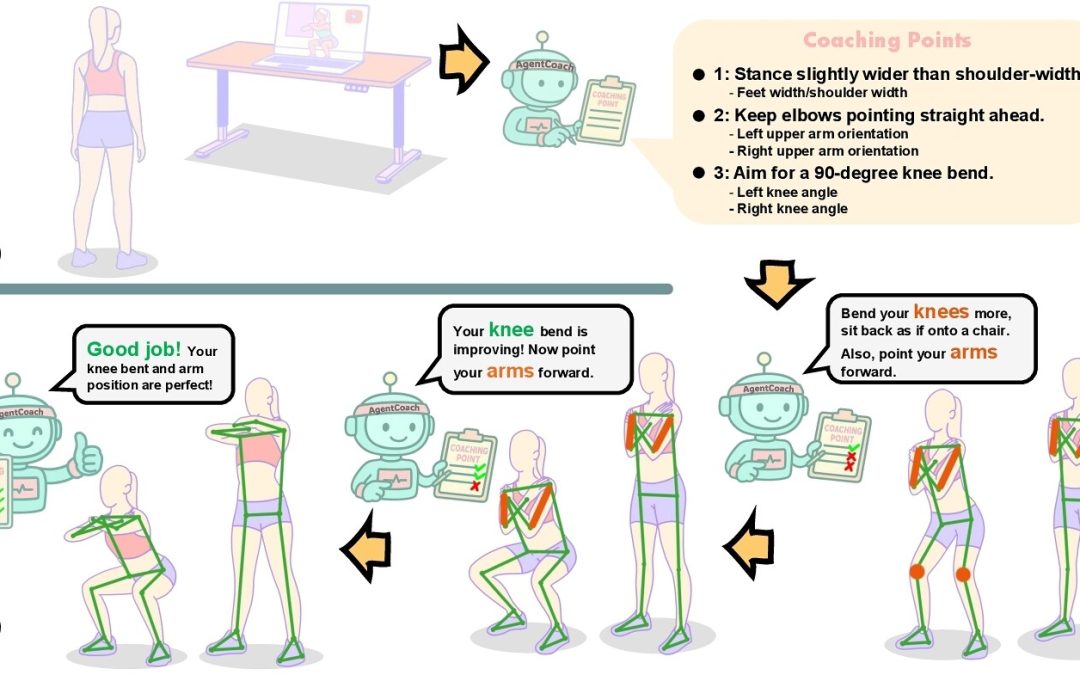
We present AgentCoach, an LLM-powered system that provides adaptive feedback for motor skill learning from tutorial videos. The system works by extracting key coaching points (CPs) and compiling CP-specific evaluators that map each cue to measurable kinematic...