In Proceedings of the ACM on Human-Computer Interaction, 8(ISS), 44-69.
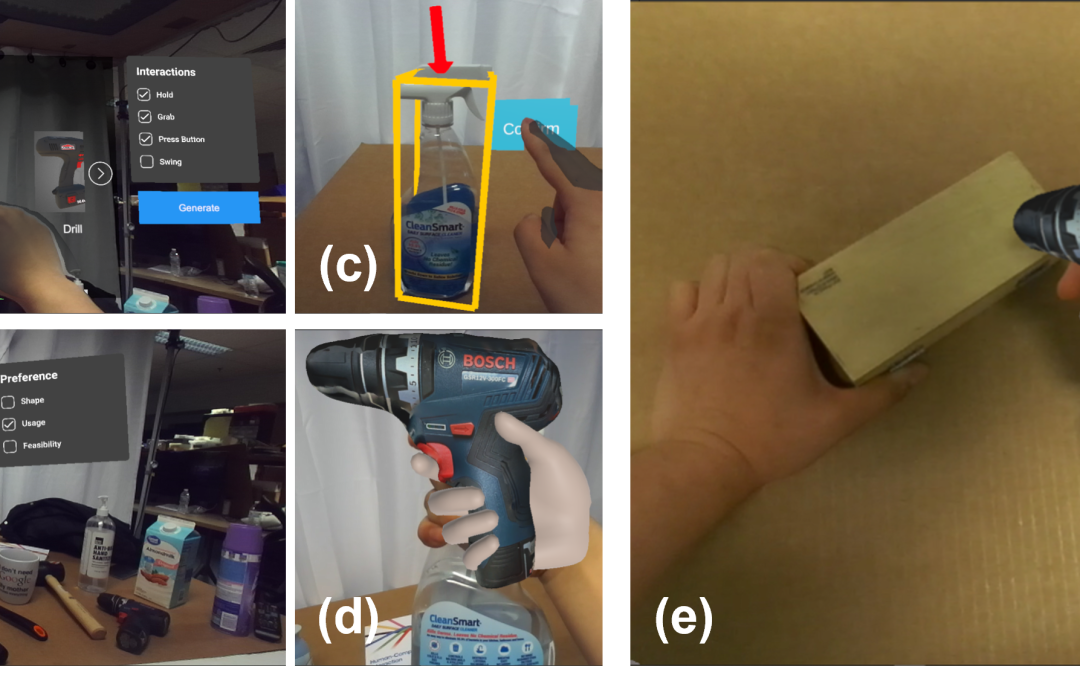
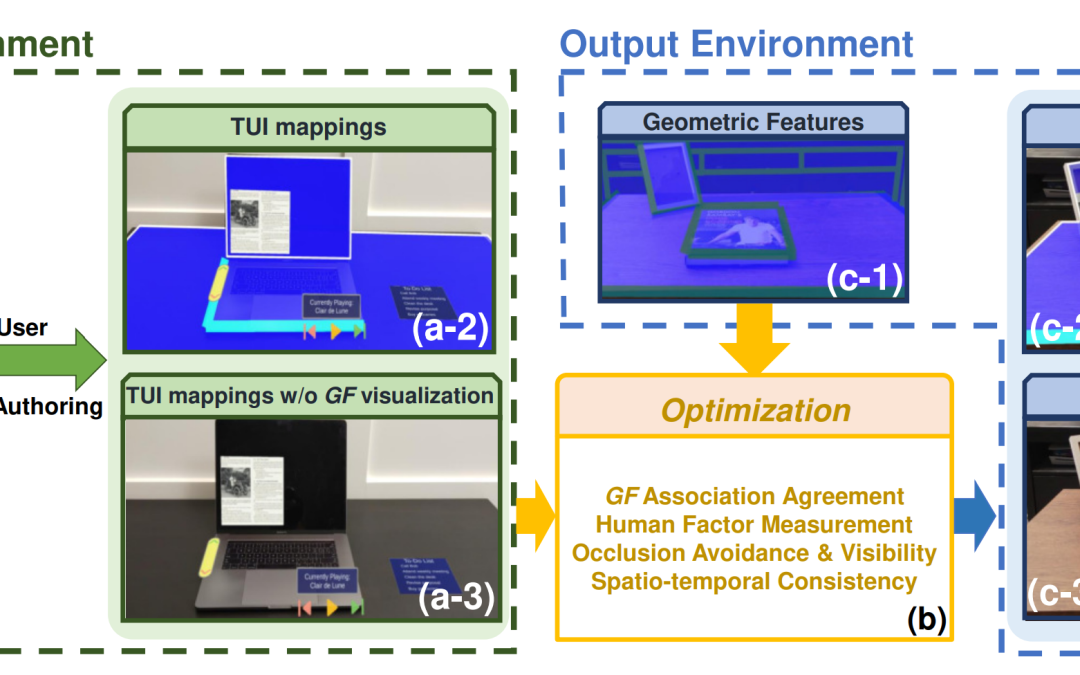
With the advents in geometry perception and Augmented Reality (AR), end-users can customize Tangible User Interfaces (TUIs) that control digital assets using intuitive and comfortable interactions with physical geometries (e.g., edges and...