by Tianyi Wang | Jul 3, 2020 | 2020, Featured Publications, Fengming He, Karthik Ramani, Karthik Ramani, Ke Huo, Publications, Recent Publications, Tianyi Wang, Xiyun Hu, Xun Qian, Yuanzhi Cao
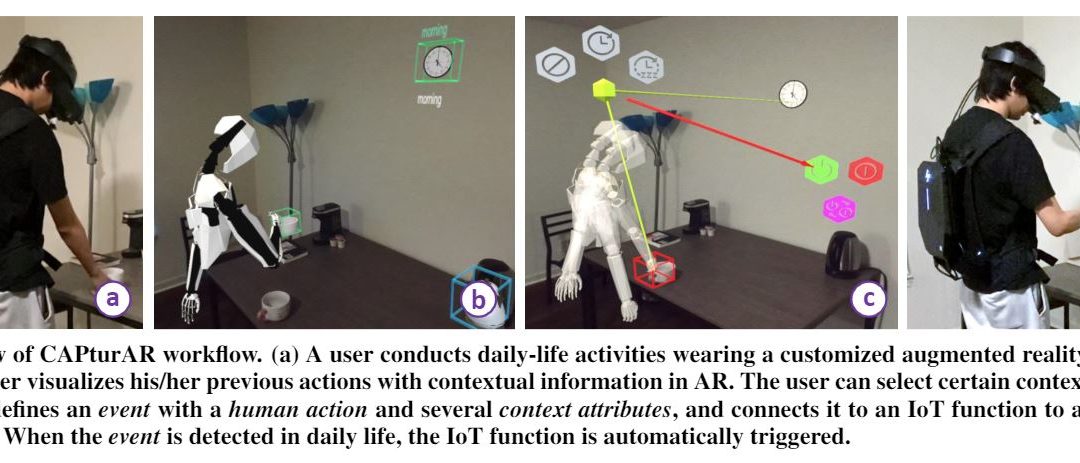
Recognition of human behavior plays an important role in context-aware applications. However, it is still a challenge for end-users to build personalized applications that accurately recognize their own activities. Therefore, we present CAPturAR, an in-situ...

by Yuanzhi Cao | Mar 1, 2020 | 2020, Convergence Accelerator, Featured Publications, Future of Work, Karthik Ramani, Ke Huo, Publications, Recent Publications, Tianyi Wang, Xun Qian, Yuanzhi Cao
Machine tasks in workshops or factories are often a compound sequence of local, spatial, and body-coordinated human-machine interactions. Prior works have shown the merits of video-based and augmented reality (AR) tutoring systems for local tasks. However, due to the...
by Tianyi Wang | Feb 9, 2020 | 2020, Karthik Ramani, Ke Huo, Publications, Recent Publications, Tianyi Wang
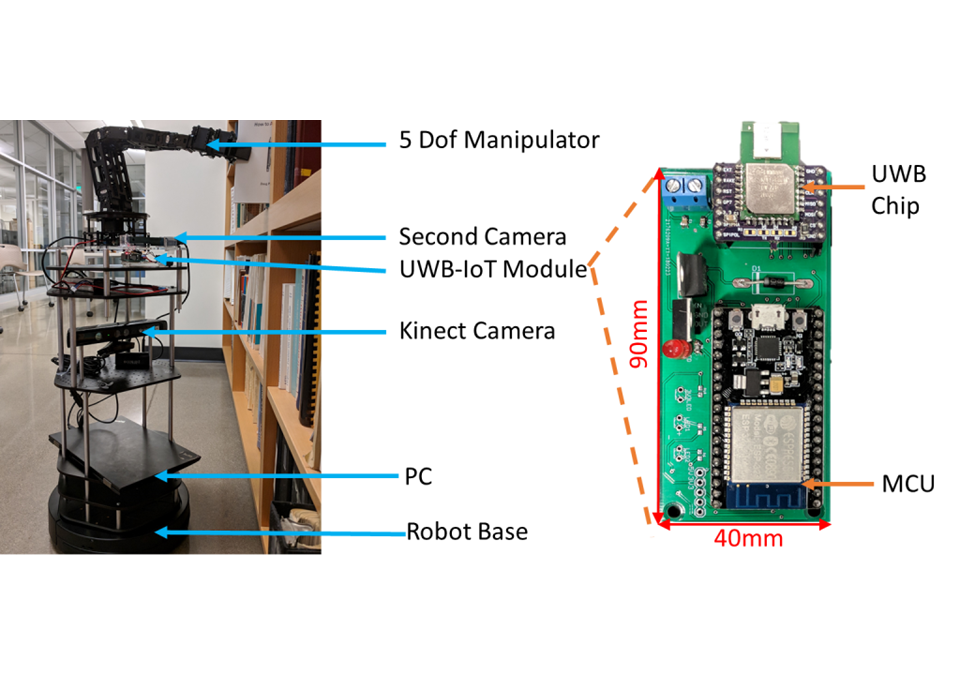
The emerging simultaneous localization and mapping (SLAM) techniques enable robots with the spatial awareness of the physical world. However, such awareness remains at a geometric level. We propose an approach for quickly constructing a smart environment with semantic...

by Yuanzhi Cao | Oct 14, 2019 | 2019, Featured Publications, Future of Work, Industrial Innovation and Partnerships, Information and Intelligent Systems, Karthik Ramani, Ke Huo, Pawan Rao, Publications, Recent Publications, Tianyi Wang, Xun Qian, Yuanzhi Cao
We present GhostAR, a time-space editor for authoring and acting Human-Robot-Collaborative (HRC) tasks in-situ. Our system adopts an embodied authoring approach in Augmented Reality (AR), for spatially editing the actions and programming the robots through...

by Convergence Design Lab Admin | Aug 6, 2019 | Ke Huo, News
Click here for publications of Dr. Ke Huo.
by Convergence Design Lab Admin | Jun 27, 2019 | 2019, Featured Publications, Future of Work, Industrial Innovation and Partnerships, Information and Intelligent Systems, Karthik Ramani, Ke Huo, Publications, Recent Publications, Yuanzhi Cao
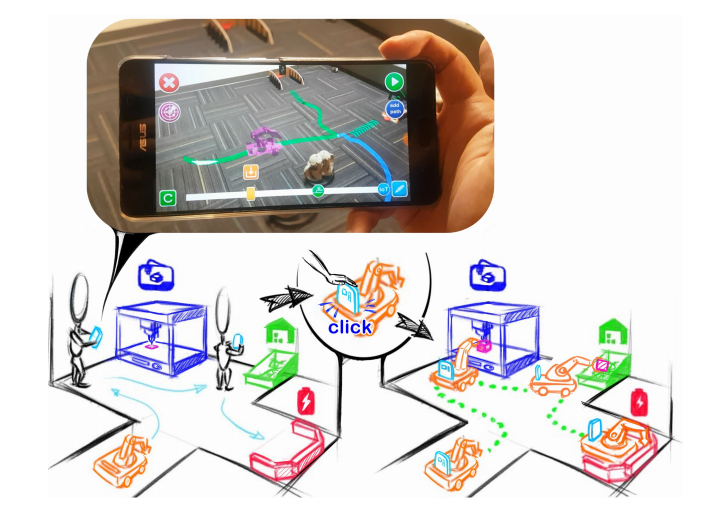
We present V.Ra, a visual and spatial programming system for robot-IoT task authoring. In V.Ra, programmable mobile robots serve as binding agents to link the stationary IoTs and perform collaborative tasks. We establish an ecosystem that coherently connects the three...