
by Sang Ho Yoon | Sep 15, 2014 | 2014, Embedded Input, Ke Huo, Publications, Sang Ho Yoon, TANGIBLE, EMBEDDED & EMBODIED INTERFACES
Abstract: We present Plex, a finger-worn textile sensor for eyes-free mobile interaction during daily activities. Although existing products like a data glove possess multiple sensing capabilities, they are not designed for environments where body and finger motion...
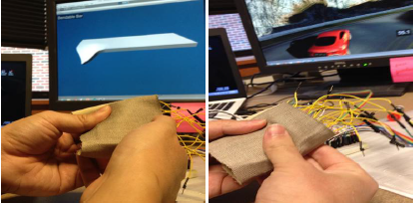
by Sang Ho Yoon | Sep 15, 2014 | 2014, Ansh Verma, Embedded Input, Publications, Sang Ho Yoon, TANGIBLE, EMBEDDED & EMBODIED INTERFACES
We present BendID, a bendable input device that recognizes the location, magnitude and direction of its deformation. We use BendID to provide users with a tactile metaphor for pressure based input. The device is constructed by layering an array of indium tin oxide...
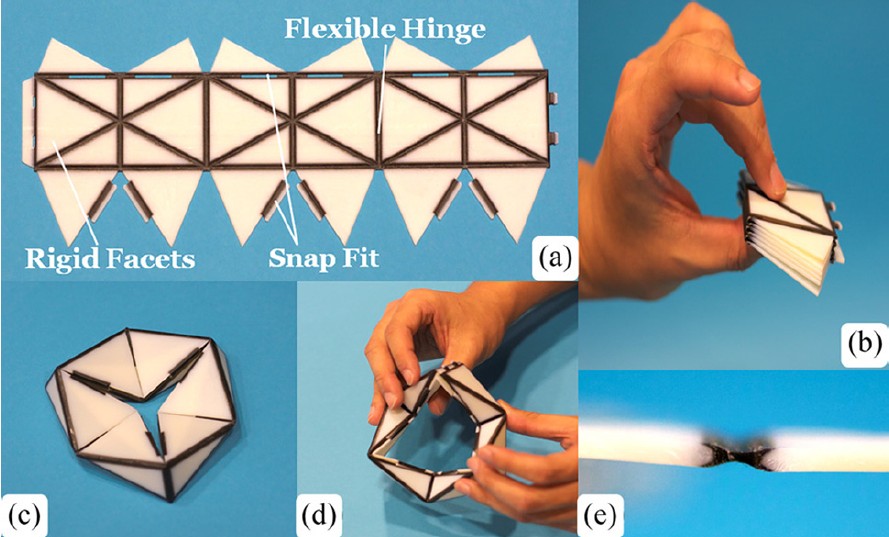
by wei | Aug 22, 2014 | 2013, DESIGN METHOD, Design Representation, Fabrication, Publications, TANGIBLE, EMBEDDED & EMBODIED INTERFACES, Wei Gao
Abstract: As an ancient paper craft originating from Japan, origami has been naturally embedded and contextualized in a variety of applications in the fields of mathematics, engineering, food packaging, and biological design. The computational and manufacturing...
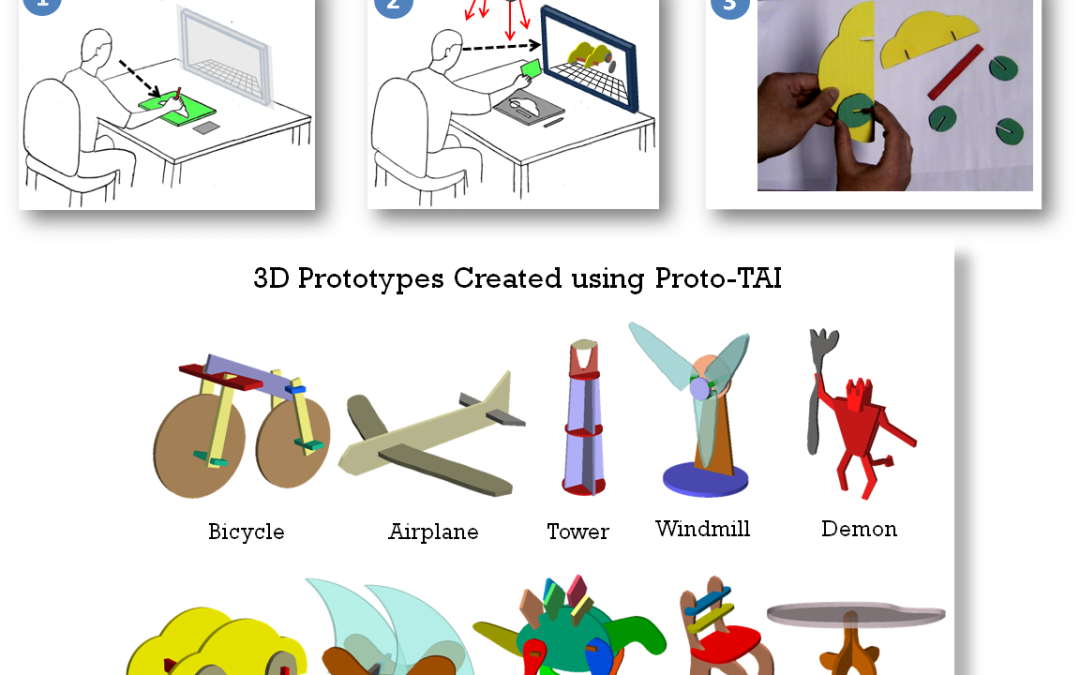
by cecil | Aug 14, 2014 | 2014, Cecil Piya, Embedded Input, HUMAN SHAPE INTERACTION, Karthik Ramani, Mid-air Interaction, Multi-touch Interaction, TANGIBLE, EMBEDDED & EMBODIED INTERFACES
In the real world, we use our innate manual dexterity to create and manipulate 3D objects. Conventional virtual design tools largely neglect this skill by imposing non-intuitive 2D control mechanisms for interacting with 3D design models. Their usage is thus...

by wei | Jun 20, 2014 | 2014, DESIGN METHOD, Design Representation, Fabrication, Karthik Ramani, Ke Huo, Publications, TANGIBLE, EMBEDDED & EMBODIED INTERFACES, Wei Gao
Origami affords the creation of diverse 3D objects through explicit folding processes from 2D sheets of material. Originally as a paper craft from 17th century AD, origami designs reveal the rudimentary characteristics of sheet folding: it is lightweight, inexpensive,...
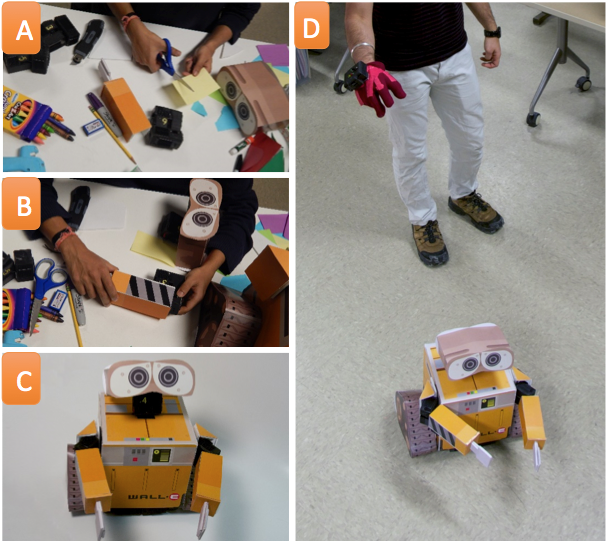
by Ansh Verma | Jun 17, 2014 | 2014, Ansh Verma, Karthik Ramani, TANGIBLE, EMBEDDED & EMBODIED INTERFACES, Tangibles
We introduce ChiroBot, a cyber-physical construction kit that allows users to create custom robots out of craft material, easily assemble the robots using joint modules and control them using hand gestures. These hand-crafted robots are assembled using our modules...