
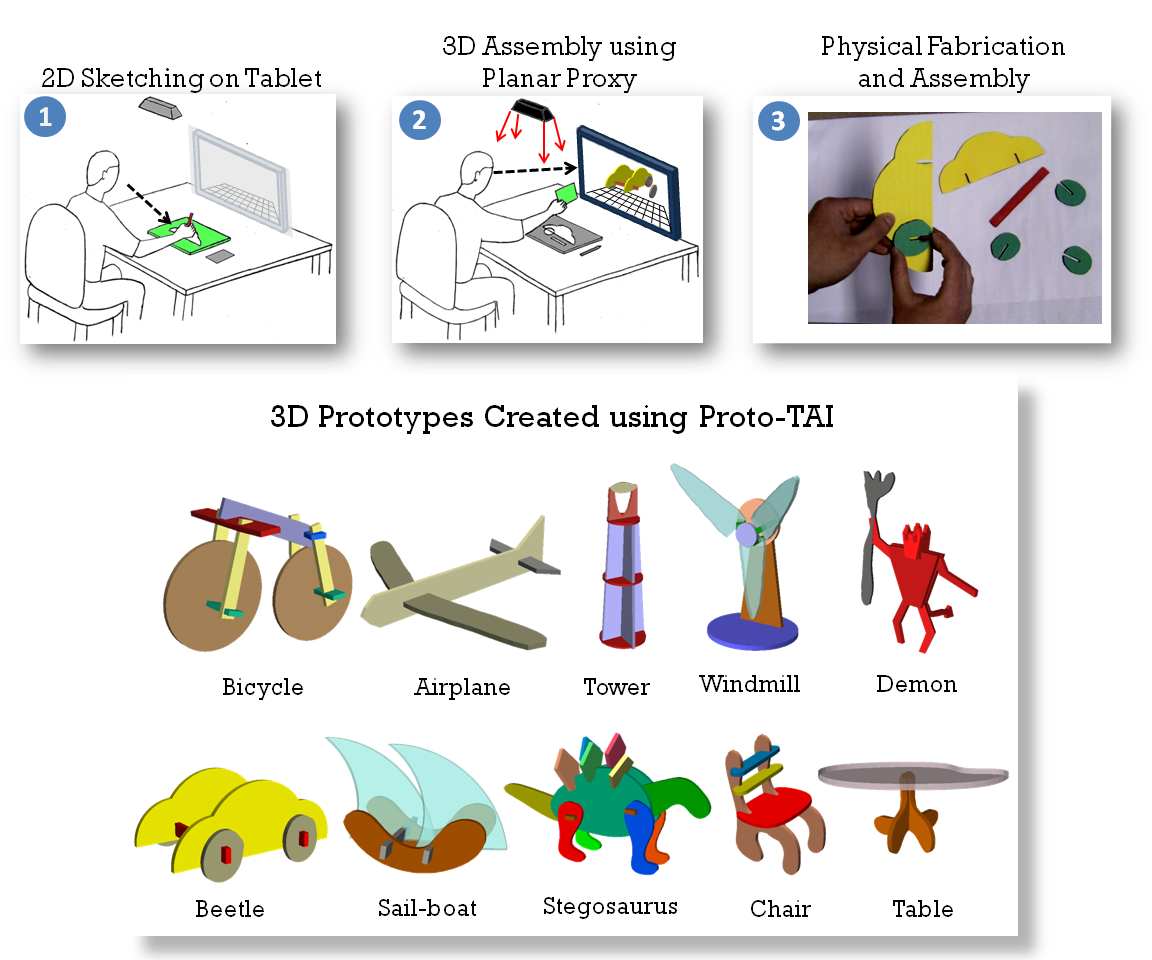
In the real world, we use our innate manual dexterity to create and manipulate 3D objects. Conventional virtual design tools largely neglect this skill by imposing non-intuitive 2D control mechanisms for interacting with 3D design models. Their usage is thus cumbersome, time consuming and requires training. We propose a novel design paradigm that combines users’ manual dexterity with the physical affordances of non-instrumented and ordinary objects to support virtual 3D design constructions. We demonstrate this paradigm through Proto-TAI, a quick prototyping application where 2D shapes are assembled into 3D representations of ideated design concepts. Here, users can create 2D shapes in a pen-based sketch medium and use expressive handheld movements of a planar proxy to configure the shapes in 3D space. The proxy provides a metaphorical means for possessing and controlling the shapes. Here, a depth sensor and computer vision algorithms track the proxy’s spatial movement. The 3D design prototype constructed in our system can be fabricated using a laser cutter and physically assembled on-the-fly. Our system has vast implications in many design and assembly contexts, and we demonstrate its usability and efficacy through user studies and evaluations.
Link To PDF: DETC2014-35442
