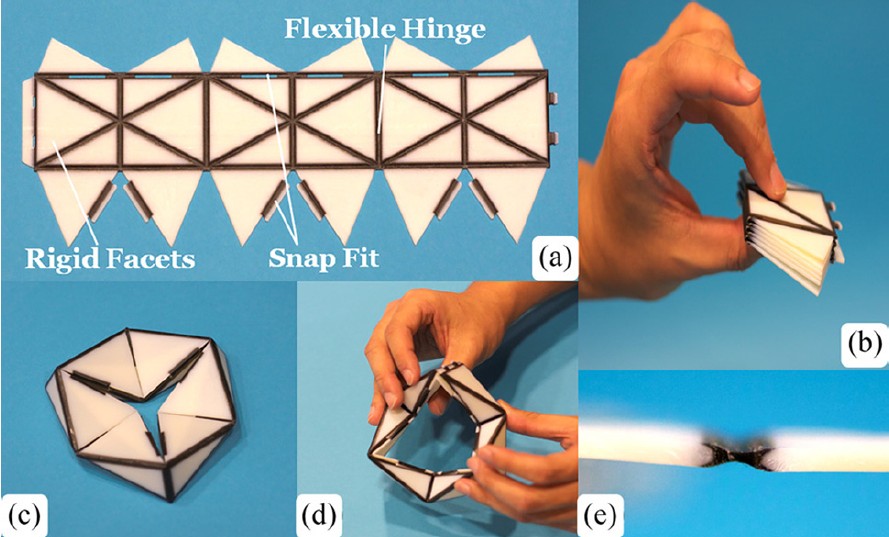
Abstract: As an ancient paper craft originating from Japan, origami has been naturally embedded and contextualized in a variety of applications in the fields of mathematics, engineering, food packaging, and biological design. The computational and manufacturing capabilities today urge us to develop significantly new forms of folding as well as different materials for folding. In this paper, by allowing line cuts with crease patterns and creating folded hinges across basic structural units (BSU), typically not done in origami, we achieve a new multi-primitive folding framework such as using tetrahedral, cuboidal, prismatic, and pyramidal components, called “Kinetogami.†“Kinetogami†enables one to fold up closed-loop(s) polyhedral mechanisms (linkages) with multi-degree-of-freedom and self-deployable characteristics in a single build. This paper discusses a set of mathematical and design theories to enable design of 3D structures and mechanisms all folded from preplanned printed sheet materials. We present prototypical exploration of folding polyhedral mechanisms in a hierarchical manner as well as their transformations through reconfiguration that reorients the material and structure. The explicit 2D fabrication layout and construction rules are visually parameterized for geometric properties to ensure a continuous folding motion free of intersection. As a demonstration artifact, a multi-material sheet is 3D printed with elastomeric flexure hinges connecting the rigid plastic facets