
by Convergence Design Lab Admin | Mar 19, 2015 | Ansh Verma, News, Sang Ho Yoon
Move over, LEGO Mindstorm and K’NEX. There’s a new robot toy in town, and it was created right here in Indiana. The HandiMate robot toolkit is the brainchild of Purdue University Professor of Mechanical Engineering Karthik Ramani, and it could soon be a...

by Ansh Verma | Jan 25, 2015 | Ansh Verma, News
There’s a new DIY robotics toolkit in town, and you don’t need to know anything about electronics or programming to use it. HandiMate, developed by researchers from Purdue and Indiana universities, lets children (or anyone else) build robots with cardboard,...

by Convergence Design Lab Admin | Jan 5, 2015 | 2015, Ansh Verma, Design Learn, DESIGN METHOD, Jasjeet Seehra, Karthik Ramani, Publications, TANGIBLE, EMBEDDED & EMBODIED INTERFACES, Tangibles
The combination of technological progress and a growing interest in design has promoted the prevalence of DIY (Do It Yourself) and craft activities. In a similar spirit, we introduce HandiMate, a platform that makes it easier to fabricate and animate...
by Convergence Design Lab Admin | Dec 3, 2014 | 2015, DESIGN METHOD, Design Representation, Karthik Ramani, Publications
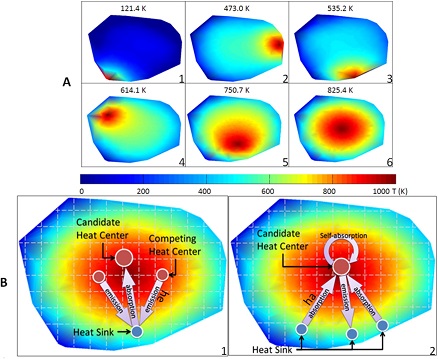
Researchers are regularly interested in interpreting the multipartite structure of data entities according to their functional relationships. Data is often heterogeneous with intricately hidden inner structure. With limited prior knowledge, researchers are likely to...
by Sang Ho Yoon | Dec 2, 2014 | 2015, Embedded Input, Ke Huo, Sang Ho Yoon, TANGIBLE, EMBEDDED & EMBODIED INTERFACES
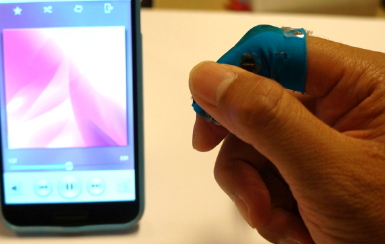
Abstract: We introduce TIMMi, a textile input device for mobile interactions. TIMMi is worn on the index finger to provide a multimodal sensing input metaphor. The prototype is fabricated on a single layer of textile where the conductive silicone rubber is painted and...

by Sang Ho Yoon | Dec 1, 2014 | 2015, Ansh Verma, Embedded Input, Sang Ho Yoon, TANGIBLE, EMBEDDED & EMBODIED INTERFACES, Vinh Nguyen
We present SOFTii, a flexible input system for topography design and continuous control via external force. Our intent is to provide a tactile metaphor for pressure-based surface input. In this study, two prototypes of SOFTii have been fabricated: (a) The first...