
by Convergence Design Lab Admin | May 19, 2019 | 2019, Future of Work, Industrial Innovation and Partnerships, Information and Intelligent Systems, Karthik Ramani, Ke Huo, Recent Publications, Yuanzhi Cao
We present V.Ra, a visual and spatial programming system for robot-IoT task authoring. In V.Ra, programmable mobile robots serve as binding agents to link the stationary IoTs and perform collaborative tasks. We establish an ecosystem that coherently connects the three...
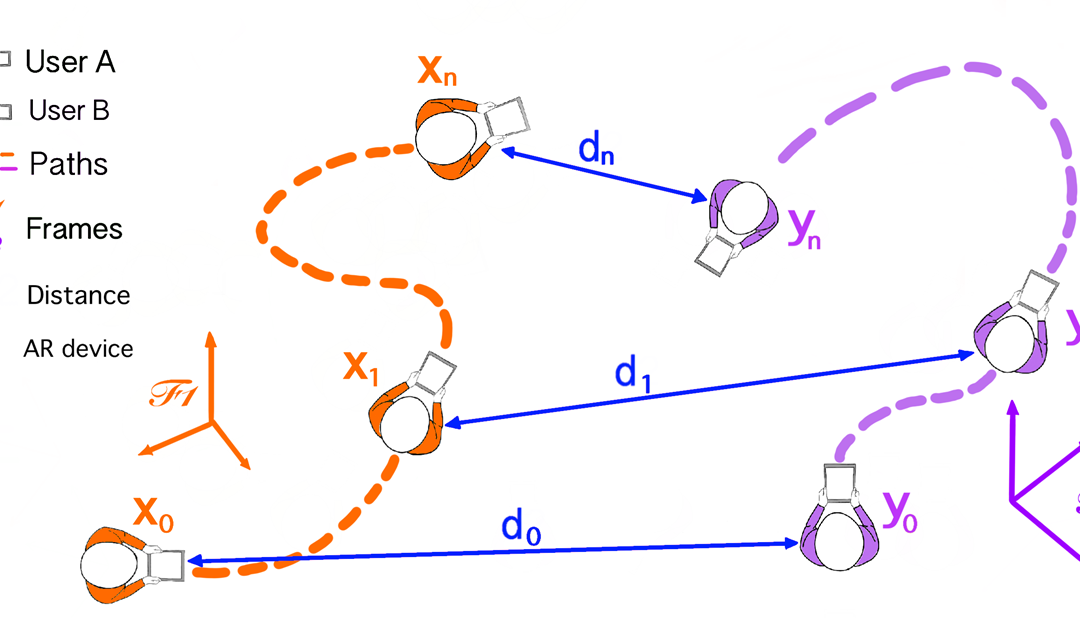
by Convergence Design Lab Admin | Oct 15, 2018 | 2018, Ana Villanueva, Karthik Ramani, Ke Huo, Luis Paredes, Recent Publications, Tianyi Wang, Yuanzhi Cao
We present SynchronizAR, an approach to spatially register multiple SLAM devices together without sharing maps or involving external tracking infrastructures. SynchronizAR employs a distance based indirect registration which resolves the transformations between the...

by Convergence Design Lab Admin | Sep 30, 2018 | 2018, Embedded Input, Fabrication, Karthik Ramani, Ke Huo, Luis Paredes, Publications, Recent Publications, Sang Ho Yoon, TANGIBLE, EMBEDDED & EMBODIED INTERFACES, Tangibles
Abstract: We introduce MultiSoft, a multilayer soft sensor capable of sensing real-time contact localization, classification of deformation types, and estimation of deformation magnitudes. We propose a multimodal sensing pipeline that carries out both inverse problem...
by Convergence Design Lab Admin | Sep 1, 2018 | Karthik Ramani, Ke Huo, News, Tianyi Wang
Plain2Fun: Augmenting Ordinary Objects with Interactive Functions by Auto-Fabricating Surface Painted Circuits; receives an honorable mention among 400+ total submissions at the proceedings of the 2018 DIS Designing Interactive Systems Conference, June 9-13, 2018,...
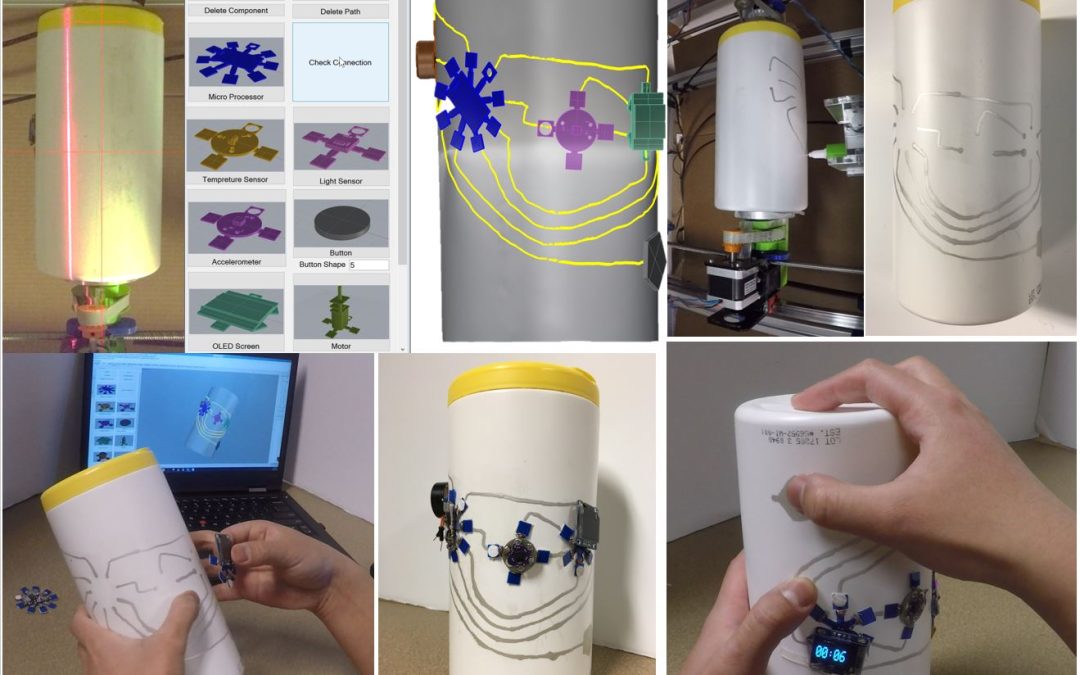
by Tianyi Wang | Jun 23, 2018 | 2018, Fabrication, Karthik Ramani, Karthik Ramani, Ke Huo, Pratik Chawla, Recent Publications, TANGIBLE, EMBEDDED & EMBODIED INTERFACES, Tianyi Wang
The growing makers’ community demands better supports for designing and fabricating interactive functional objects. Most of the current approaches focus on embedding desired functions within new objects. Instead, we advocate repurposing the existing objects and...
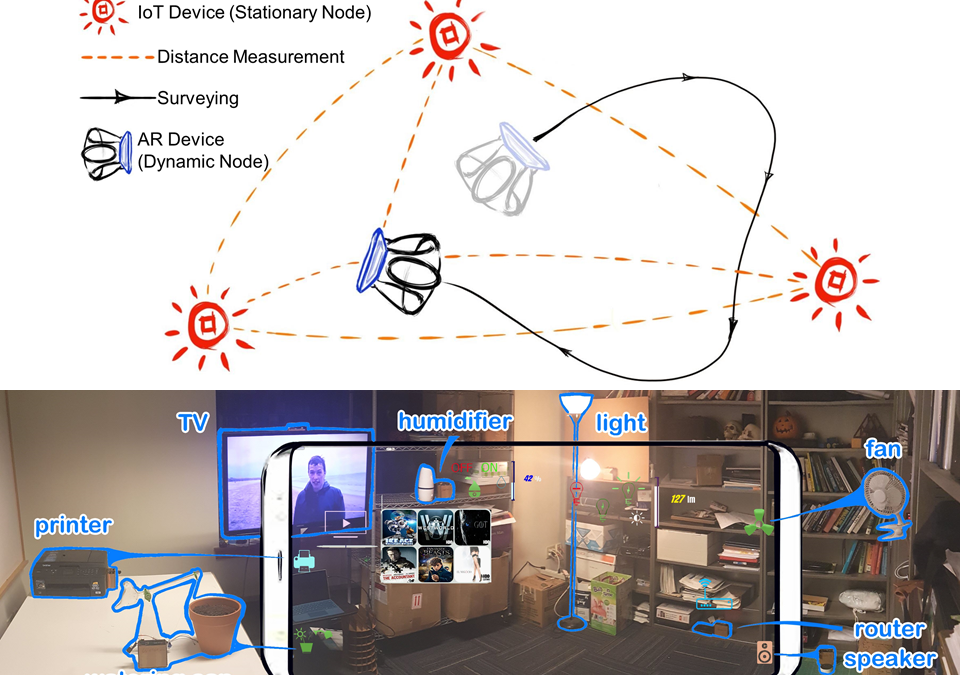
by Convergence Design Lab Admin | Apr 21, 2018 | 2018, Featured Publications, HUMAN SHAPE INTERACTION, Ke Huo, Recent Publications, Sang Ho Yoon, TANGIBLE, EMBEDDED & EMBODIED INTERFACES, Yuanzhi Cao
The emerging simultaneous localizing and mapping (SLAM) based tracking technique allows the mobile AR device spatial awareness of the physical world. Still, smart things are not fully supported with the spatial awareness in AR. Therefore, we present Scenariot, a...