
by Yuanzhi Cao | Mar 1, 2020 | 2020, Convergence Accelerator, Featured Publications, Future of Work, Karthik Ramani, Ke Huo, Publications, Recent Publications, Tianyi Wang, Xun Qian, Yuanzhi Cao
Machine tasks in workshops or factories are often a compound sequence of local, spatial, and body-coordinated human-machine interactions. Prior works have shown the merits of video-based and augmented reality (AR) tutoring systems for local tasks. However, due to the...
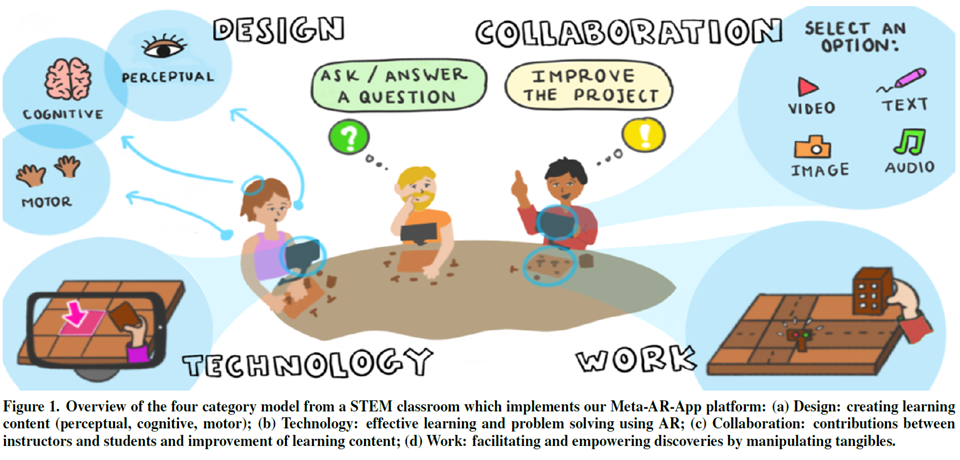
by Ana Villanueva | Mar 1, 2020 | 2020, Ana Villanueva, Convergence Accelerator, Featured Publications, Future of Work, Karthik Ramani, Publications, Recent Publications, Zhengzhe Zhu, Ziyi Liu
Augmented Reality (AR) has become a valuable tool for education and training processes. Meanwhile, cloud-based technologies can foster collaboration and other interaction modalities to enhance learning. We combine the cloud capabilities with AR technologies to present...

by Convergence Design Lab Admin | Mar 1, 2020 | Convergence Accelerator, Future of Work, News
This year, four paper submissions from Convergence Design Lab were accepted in the ACM Conference on Human Factors in Computing Systems (CHI). The four papers are listed below and the full papers will be released later. For more information about CHI 2020, please...

by Yuanzhi Cao | Oct 14, 2019 | 2019, Featured Publications, Future of Work, Industrial Innovation and Partnerships, Information and Intelligent Systems, Karthik Ramani, Ke Huo, Pawan Rao, Publications, Recent Publications, Tianyi Wang, Xun Qian, Yuanzhi Cao
We present GhostAR, a time-space editor for authoring and acting Human-Robot-Collaborative (HRC) tasks in-situ. Our system adopts an embodied authoring approach in Augmented Reality (AR), for spatially editing the actions and programming the robots through...
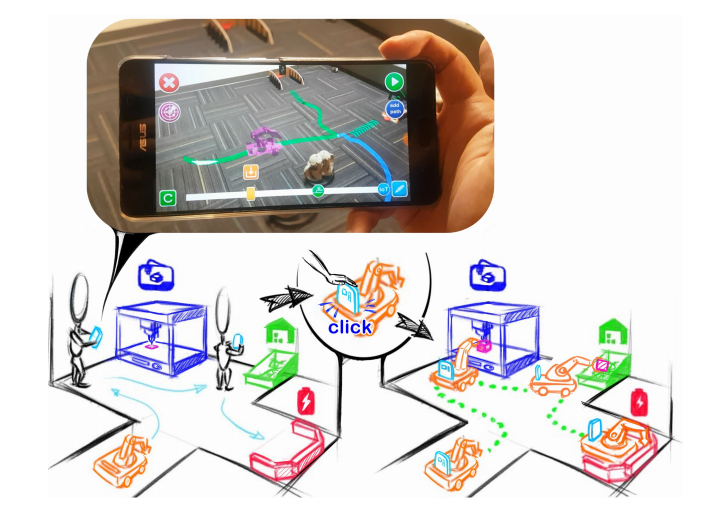
by Convergence Design Lab Admin | Jun 27, 2019 | 2019, Featured Publications, Future of Work, Industrial Innovation and Partnerships, Information and Intelligent Systems, Karthik Ramani, Ke Huo, Publications, Recent Publications, Yuanzhi Cao
We present V.Ra, a visual and spatial programming system for robot-IoT task authoring. In V.Ra, programmable mobile robots serve as binding agents to link the stationary IoTs and perform collaborative tasks. We establish an ecosystem that coherently connects the three...

by Convergence Design Lab Admin | May 19, 2019 | 2019, Future of Work, Industrial Innovation and Partnerships, Information and Intelligent Systems, Karthik Ramani, Ke Huo, Recent Publications, Yuanzhi Cao
We present V.Ra, a visual and spatial programming system for robot-IoT task authoring. In V.Ra, programmable mobile robots serve as binding agents to link the stationary IoTs and perform collaborative tasks. We establish an ecosystem that coherently connects the three...