Sang Ho Yoon is currently working at Microsoft, Seattle, WA.
He received his PhD at Purdue University and his B.S & M.S degrees from Carnegie Mellon University in 2008 with major in Mechanical Engineering and minor in Robotics. He worked at Research Department in LG Display & LG Electronics for 5 years. There, he involved in product development for consumer electronics as well as the futuristic products including ‘Transparent & Public Display’, ‘Assistive/Rehabilitation Robot’, and ‘Smart Car User Interface’.
He is particularly interested in applying novel sensing techniques to bring the new forms of input metaphor for Human-computer interaction. Areas of interest include wearable/tangible interface, sensing techniques & fabrication, and novel input device. Currently, his research aims at combining the state-of-art machine learning approaches with novel sensing technique to better support natural human-computer interaction.
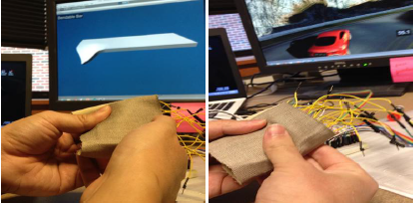
TIMMi: Finger-worn Textile Input Device with Multimodal Sensing in Mobile Interaction
Abstract: We introduce TIMMi, a textile input device for mobile interactions. TIMMi is worn on the index finger to provide a multimodal sensing input metaphor. The prototype is fabricated on a single layer of textile where the conductive silicone rubber is painted and...
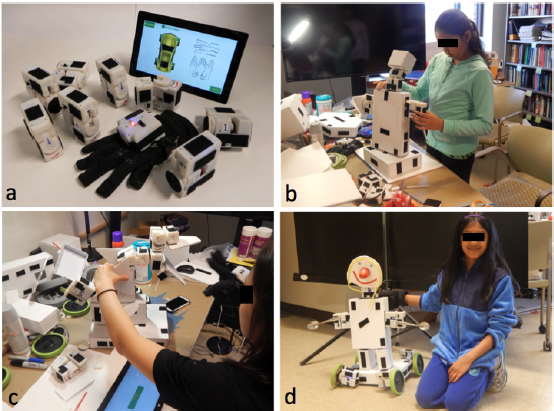
SOFTii: Soft Tangible Interface for Continuous Control of Virtual Objects with Pressure-based Input
We present SOFTii, a flexible input system for topography design and continuous control via external force. Our intent is to provide a tactile metaphor for pressure-based surface input. In this study, two prototypes of SOFTii have been fabricated: (a) The first...
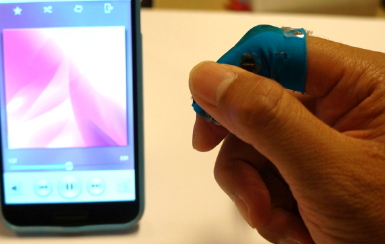
Plex: Finger-Worn Textile Sensor for Mobile Interaction during Activities
Abstract: We present Plex, a finger-worn textile sensor for eyes-free mobile interaction during daily activities. Although existing products like a data glove possess multiple sensing capabilities, they are not designed for environments where body and finger motion...