
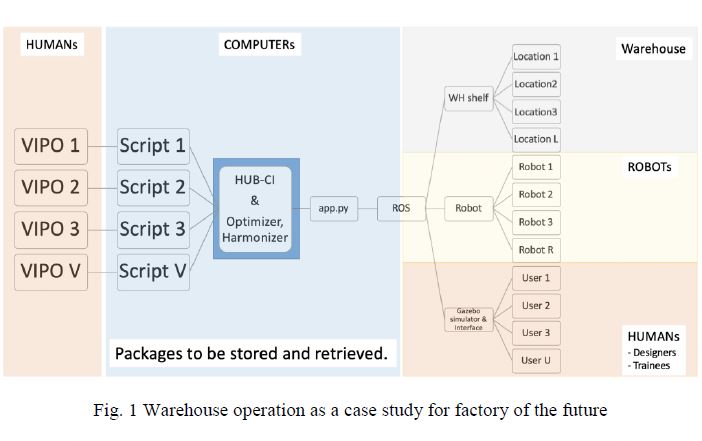
Rapid advances in production systems’ models and technology continually challenge manufacturers preparing for the factories of the future. To address the complexity issues typically coupled with the improvements, we have developed a brain-inspired model for production systems, HUB-CI. It is a virtual Hub for Collaborative Intelligence, receiving human instructions from a humancomputer interface; and in turn, commanding robots via ROS. The purpose of HUB-CI is to manage diverse local information and real-time signals obtained from system agents (robots, humans, and warehouse components, e.g., carts, shelves, racks) and globally update real-time assignments and schedules for those agents. With Collaborative Control Theory (CCT) we first develop the protocol for collaborative requirement planning for a HUB-CI, (CRP-H), through which we can synchronize the agents to work smoothly and execute rapidly changing tasks. This protocol is designed to answer: Which robot(s) should perform each human-assigned task, and when should this task be performed? The primary two phases of CRP-H, CRP-I (task assignment optimization) and CRP-II (agents schedule harmonization) are developed and validated for two test scenarios: a two-robot collaboration system with five tasks; and a two-robot-and-helper-robot collaboration system with 25 tasks. Simulation results indicate that under CRP-H, both operational cost and makespan of the production work are significantly reduced in the two scenarios. We summarize with the implications and future plans for integrating HUB-CI and CRP-H in a cyber-augmented physical simulation model.