Computers & Education: X Reality, Volume 8, 2026, 100132, ISSN 2949-6780
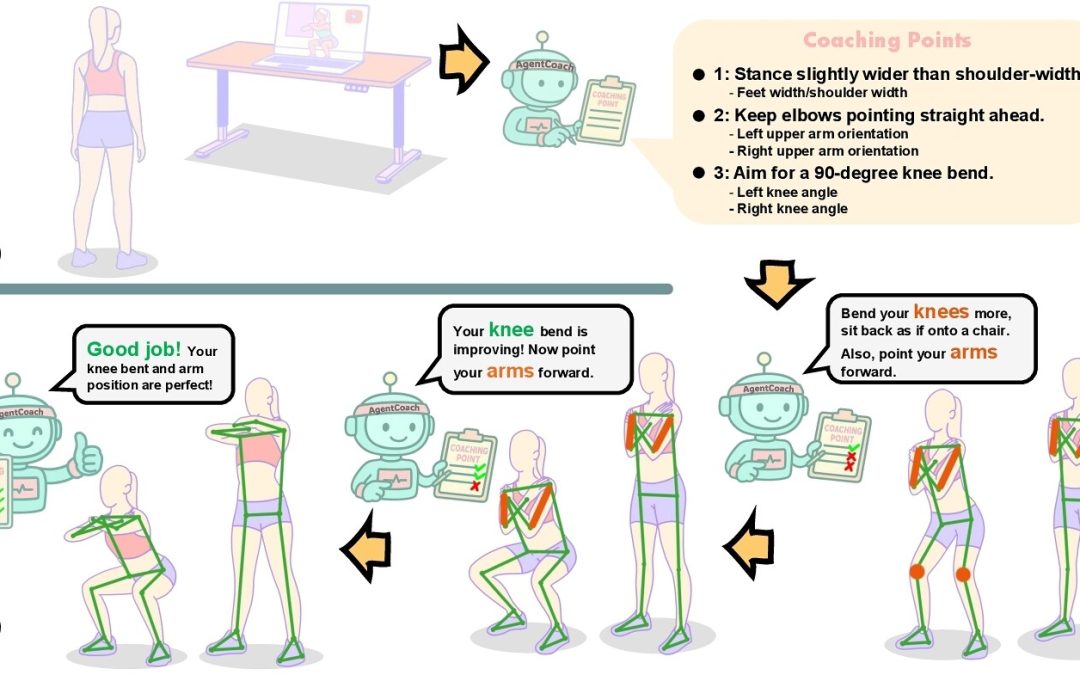
Mechanical assembly animations are essential for conveying complex technical procedures, especially in instructional and training contexts. With the growing adoption of immersive Virtual Reality (iVR) in education and industry, there is a critical...