Administrator of the Convergence Design Lab website.

HexaMorph: A Reconfigurable and Foldable Hexapod Robot Inspired by Origami
Abstract: Origami affords the creation of diverse 3D objects through explicit folding processes from 2D sheets of material. Originally as a paper craft from 17th century AD, origami designs reveal the rudimentary characteristics of sheet folding: it is lightweight,...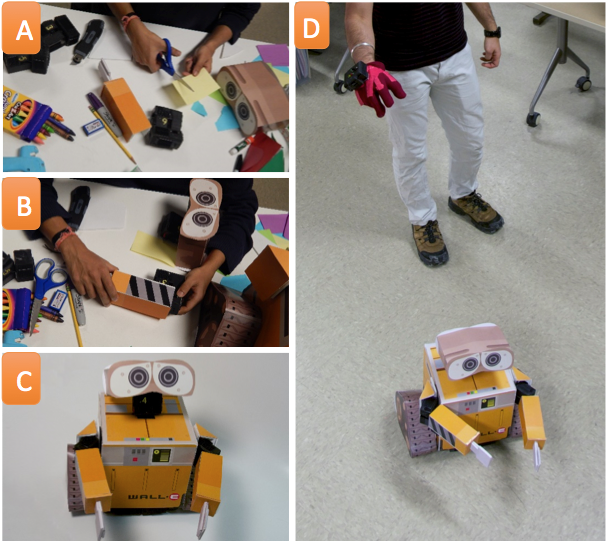
ChiroBot: Modular-Robotic Manipulation via Spatial Hand Gestures.
Abstract: We introduce ChiroBot, a cyber-physical construction kit that allows users to create custom robots out of craft material, easily assemble the robots using joint modules and control them using hand gestures. These hand-crafted robots are assembled using our...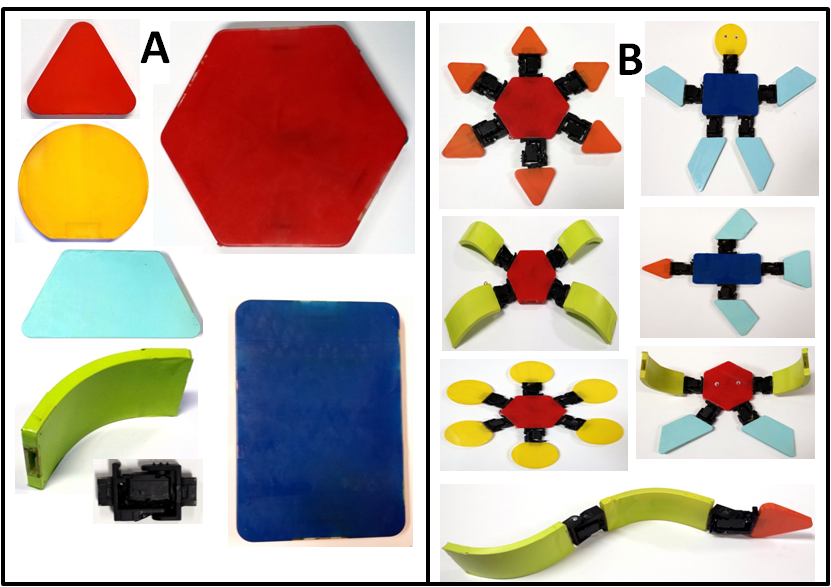
PuppetX: A Framework for Gestural Interactions With User Constructed Playthings
Abstract: We present PuppetX, a framework for both constructing playthings and playing with them using spatial body and hand gestures. This framework allows users to construct various playthings similar to puppets with modular components representing basic geometric...