Argentine consul general visits ISAT lab

Argentine Consul General Atilio Berardi (5th from left) and his team visiting Prof. Wachs’ ISAT Lab.

Glebys shows Consul Berardi how
to use Taurus.
to use Taurus.

Natalia Sanchez demonstrates a virtual reality interface to control the YuMi robot.

Maru Cabrera demonstrates Baxter robot.
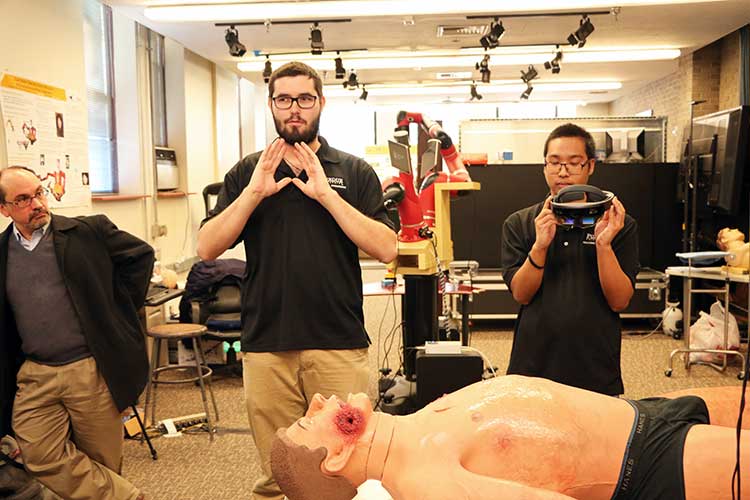
Edgar and Taa show the trainee subsystem for telementoring based on Hololens and augmented reality.

Juan demonstrates a potential application of autonomous drones.

Taa shows “Super Baxter” robot with two Sawyer arms to Consul Berardi.
Dr. Juan Pablo Wachs and the ISAT Lab welcomed Mr. Atilio Berardi, Consul General of Argentina, and his team last week during a visit to Purdue University.
ISAT students impressively presented their robots and research to the visitors:
- Natalia Sanchez Tamayo, visiting scholar, showed a virtual reality interface to control the YuMi robot using a depth camera and VIVE controllers, and showed a 3D-printed surgical gripper for the industrial collaborative robot YuMI.
- Glebys Gonzalez, third-year PhD student, showed the robot Taurus as a platform for robotic teleoperation in laparoscopic training tasks.
- Maru Cabrera, PhD Candidate, demonstrated some of the capabilities of the Baxter robot to collaborate safely with and around humans.
- Edgar Rojas Muñoz, PhD Student, showcased a system which would allow medics located in remote environments (e.g., rural areas and battlefields) to receive guidance from expert surgeons by presenting surgical annotations directly into their field of view.
- Juan Andres Carvajal, first-year PhD student, showed the initial steps of a project using an autonomous drone to acquire images in austere environments by hovering over patients.
- Taa Soratana, second-year Master's student, demonstrated the Marni robotic platform for social robotics and human interaction through facial expressions and neck gestures; and also demonstrated the "Super Baxter" bimanual collaborative robot, which locates and manipulates objects in real time.