Image Denoising and Restoration
 |
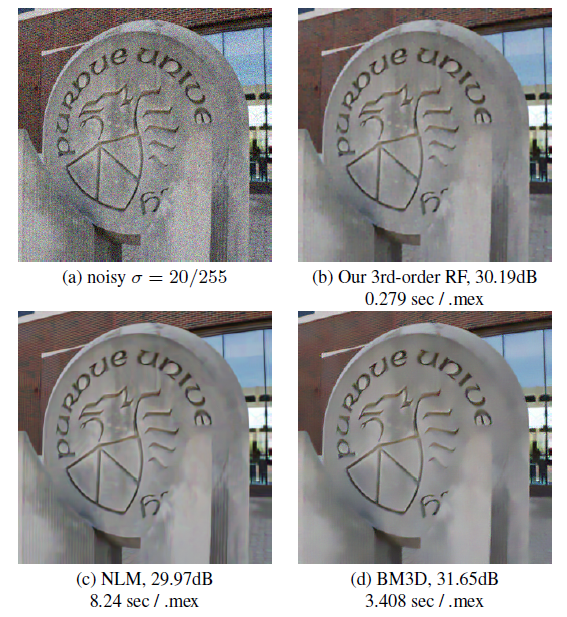
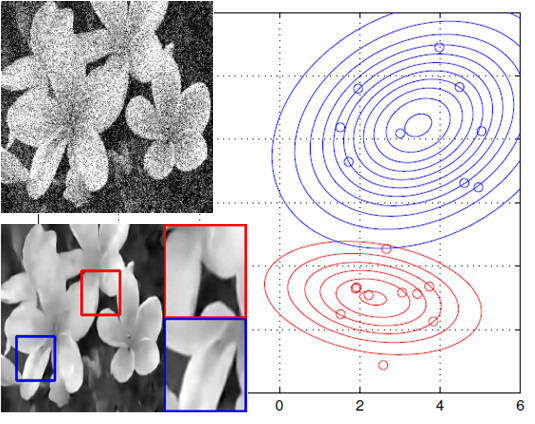
Understanding symmetric smoothing filters: A Gaussian mixture model perspective
Stanley H. Chan, Todd Zickler, and Yue M. Lu
IEEE Transactions on Image Processing, 2017
Manuscript
Understanding symmetric smoothing filters via Gaussian mixtures
Stanley H. Chan, Todd Zickler, Yue M. Lu
IEEE ICIP, 2015
Manuscript
|
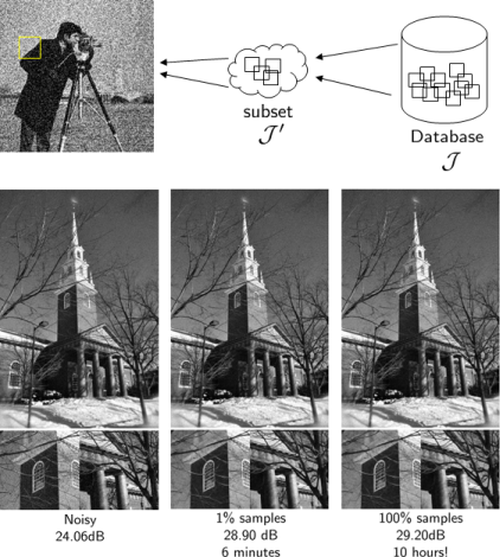 |
Monte Carlo non local means: Random sampling for large-scale image filtering
Stanley H. Chan, Todd Zickler, and Yue M. Lu
IEEE Transactions on Image Processing, 2014
Manuscript
MATLAB Implementation
Fast non-local filtering by random sampling: it works, especially for large images
Stanley H. Chan, Todd Zickler and Yue M. Lu
IEEE ICASSP, 2013
Manuscript
|
 |
Adaptive image denoising by mixture adaptation
Enming Luo, Stanley H. Chan, and Truong Q. Nguyen
IEEE Transactions on Image Processing, 2016
Manuscript
MATLAB Implementation
Adaptive patch-based image denoising by EM adaptation
Stanley H. Chan, Enming Luo, and Truong Q. Nguyen
IEEE GlobalSIP, 2015
Manuscript
|
 |
Adaptive image denoising by targeted databases
Enming Luo, Stanley H. Chan, and Truong Q. Nguyen
IEEE Transactions on Image Processing, 2015
Manuscript
MATLAB Implementation
Image Denoising by Targeted External Databases
Enming Luo, Stanle H. Chan, and Truong Q. Nguyen
IEEE ICASSP, 2014
Manuscript
|
 |
An augmented Lagrangian method for total variation video restoration
Stanley H. Chan, Ramsin Khoshabeh, Kris B. Gibson, Philip E. Gill and Truong Q. Nguyen
IEEE Transactions on Image Processing, 2011
Manuscript
MATLAB Implementation
An augmented Lagrangian method for video restoration
Stanley H. Chan, Ramsin Khoshabeh, Kris Gibson, Philip E. Gill and Truong Q. Nguyen
IEEE ICASSP, 2011
Manuscript
Directional Decomposition Based Total Variation Image Restoration
Daniel Pipa, Stanley H. Chan, and Truong Q. Nguyen
EUSIPCO, 2012
Manuscript
|
 |
Depth Reconstruction from Sparse Samples: Representation, Algorithm, and Sampling
Lee-Kang Liu, Stanley H. Chan, and Truong Q. Nguyen
IEEE Transactions on Image Processing, 2015
Manuscript
MATLAB Implementation
Spatio-temporal consistency in video disparity estimation
Ramsin Khoshabeh, Stanley H. Chan and Truong Q. Nguyen
IEEE ICASSP, 2011
Manuscript
|