LiDAR
Publication
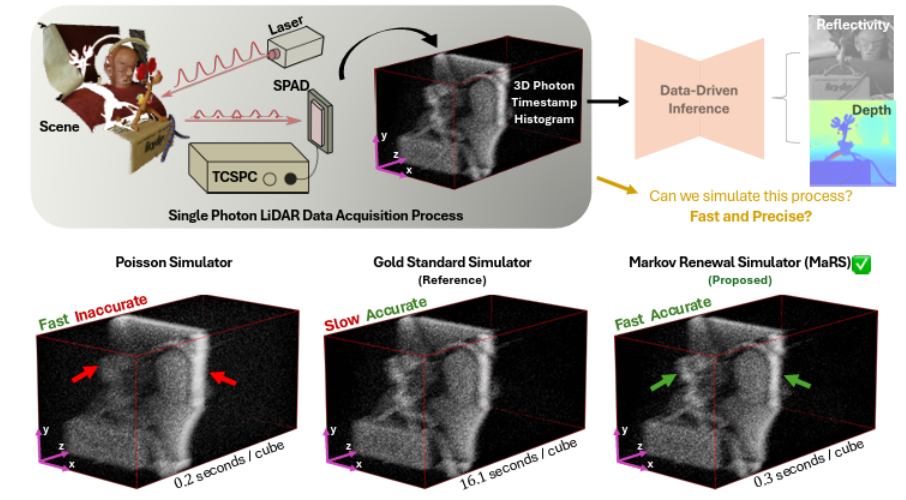 |
Markov-Renewal Single-Photon LiDAR Simulator |
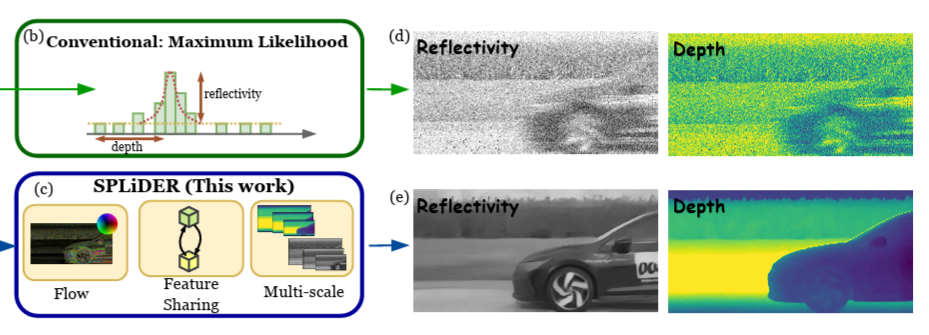 |
Joint Depth and Reflectivity Estimation using Single-Photon LiDAR |
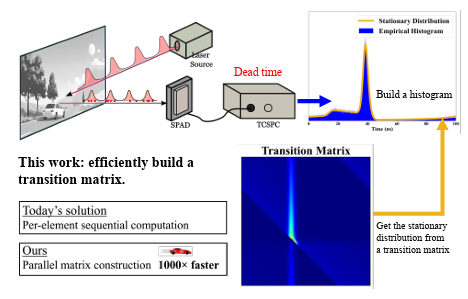 |
Real-Time Markov Modeling for Single-Photon LiDAR: 1000x Acceleration and Convergence Analysis |
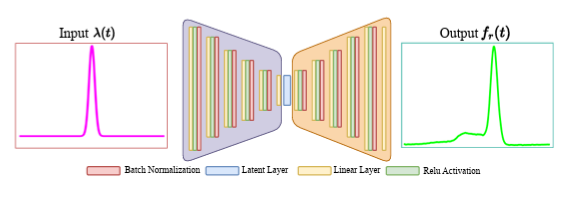 |
Ultrafast High-Flux Single-Photon LiDAR Simulator via Neural Mapping |
 |
Analysis and Improvement of Rank-Ordered Mean Algorithm in Single-Photon LiDAR |
 |
Parametric Modeling and Estimation of Photon Registrations for 3D Imaging |
 |
Resolution Limit of Single-Photon LiDAR |