Calibration of Low Cost Digital Cameras
Recent developments of digital cameras include smaller Charged Coupled Device (CCD) arrays and reduced costs, which are leading to their utilization in traditional as well as new photogrammetric surveying and mapping applications. Such cameras require careful assessment to determine their metric characteristics, which are essential to carry out photogrammetric activities.
Camera calibration aims at determining the internal characteristics of the camera. These characteristics include the principle distance or focal length, the location of the principal point and the camera distortion models. Camera calibration requires control information, which is usually available in the form of a test field. Traditional calibration test fields consist of distinct and specifically marked points or targets (Fryer, 1996) as shown in Figure 1. Establishing and maintaining a conventional test field as well as carrying out the calibration procedure require professional surveyors and photogrammetrists. These requirements limit the potential use of high quality and low cost digital cameras. Hence, current research focuses on a new approach of incorporating a test field consisting of straight lines as an alternative for representing control information. Figure 2 shows the proposed calibration test field. The optimal configuration for successfully deriving the distortion parameters is considered when establishing the required test field.

Figure 1. Traditional Test Field

Figure 2. New Test Field
In current research, camera calibration images are acquired by capturing eighteen converging and overlapping images at locations that are roughly four to five meters away from the closest point on the test field. The position and orientation of each captured image are shown in Figure 3 below.
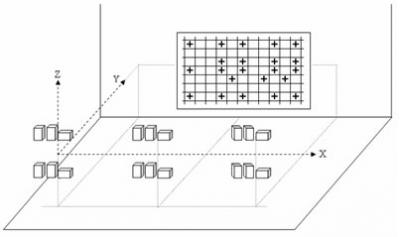
Figure 3. Position and orientation of images captured for a calibration dataset