In recent years, 3D printing has gained significant attention from the maker community, academia, and industry to support low-cost and iterative prototyping of designs. Current unidirectional extrusion systems require printing sacrificial material to support printed features such as overhangs. Furthermore, integrating functions such as sensing and actuation into these parts requires additional steps and processes to create functional enclosures, since design functionality cannot be easily embedded into prototype printing. All of these factors result in relatively high design iteration times.
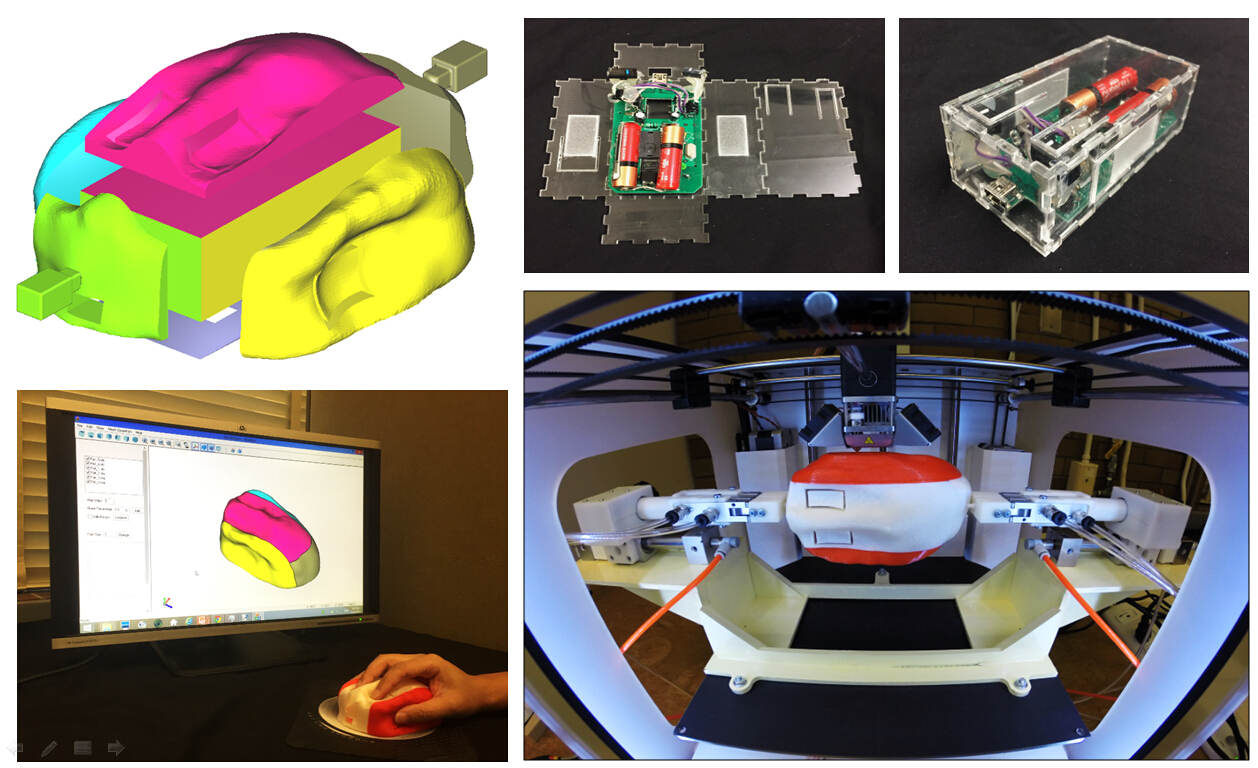
We present RevoMaker, a self-contained 3D printer that creates direct out-of-the-printer functional prototypes, using less build material and with substantially less reliance on support structures. By modifying a standard low-cost FDM printer with a revolving cuboidal platform and printing partitioned geometries around cuboidal facets, we achieve a multidirectional additive prototyping process to reduce the print and support material use. Our optimization framework considers various orientations and sizes for the cuboidal base. The mechanical, electronic, and sensory components are preassembled on the flattened laser-cut facets and enclosed inside the cuboid when closed. We demonstrate RevoMaker directly printing a variety of customized and fully-functional product prototypes, such as computer mice and toys, thus illustrating the new affordances of 3D printing for functional product design.