Mapping in the modern age


Unmanned aerial vehicles (UAV) are emerging in many technological fronts and their use is growing quickly.
According to marketing researchers at marketsandmarkets.com, the UAV market was estimated to be worth $6.8 billion in September 2014 and is anticipated to reach $10.6 billion by 2020. One significant use of this technology is as a mobile-mapping platform, providing practical and economic advantages to civil engineers.
A UAV, commonly known as a drone, is an aircraft without a human pilot. Its flight is controlled either autonomously by onboard computers or by the remote control of a pilot on the ground or in another vehicle.
The ability of UAVs to fly at lower elevation and slower speed than manned systems allows them to capture data with higher resolution. Moreover, these systems can be economically stored and deployed. By way of example, the POINT-CLOUD graphics included in this article were produced using a UAV that cost less than $1,000.
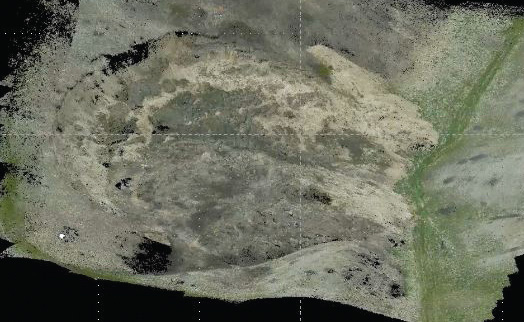
A point cloud is a set of data points in some coordinate system. In a 3-D coordinate system, these points are usually defined as X, Y and Z coordinates, and often are intended to represent the external surface of an object. They can be used for many purposes, including the creation of 3-D CAD models for manufactured parts, metrology/ quality inspection and a multitude of visualization, animation, rendering and mass customization applications. (see images to the right)
Professor Ayman Habib and other researchers within the geomatics area of the Lyles School of Civil Engineering are working to address the challenges surrounding the manipulation of acquired data by digital imaging systems onboard these low-cost UAVs.
Two such challenges include the calibration and stability analysis of imaging systems, which were not really designed for mapping purposes. Geomatics investigators also are working to establish pre-acquisition best practices as well as post-acquisition guidelines to ensure the validity of the collected data in meeting the needs of intended applications while reducing the required level of technical expertise.
Additionally, this group is studying different areas that could benefit from data collected by UAVs, such as infrastructure monitoring, transportation, landslide hazard analysis, precision agriculture and building-model generation.
“The realization of our research goals will have a tremendous impact on the diversity of areas that could benefit from geospatial data collected by UAVs,” Habib says.
Applications in Energy
Purdue recently received $6.5 million from the U.S. Department of Energy for research aimed at producing superior strains of sorghum suitable for growing as a biofuel. The research team from Purdue includes Ayman Habib as well as Melba Crawford, professor of agronomy, professor of civil engineering, and associate dean for research in the College of Engineering. This group, along with a team from IBM, will use digital
imaging systems onboard UAVs as well as wheel-based mobile mapping systems for accurate derivation of detailed and precise measurements of plant characteristics, referred to as phenotypes, that relate to growth, development and water tolerance. The phenotype characteristics (e.g., plant height, leaf area, biomass) will be correlated with the genetic structure of the plants to identify the structure that produces the highest crop yield for biofuel production.