Linear Features in Photogrammetry
Photogrammetric manipulation of imagery has been, for the major part, a point-based operation. The utilization of points is still convenient because a few manually digitized points can be accurately obtained to carry out various photogrammetric orientation procedures (e.g., relative and absolute orientation as well as photogrammetric triangulation). On the other hand, the constant evolution of digital photogrammetry calls for the use of other primitives since distinct points fall short when attempting to derive higher level/semantic information from the input imagery. As a result, there has been a tremendous interest by photogrammetric researchers in utilizing linear features in various photogrammetric activities. This interest is attributed to the fact that the extraction of linear features from the image space is easier to automate than distinct points. However, object space linear features can be directly derived form terrestrial Mobile Mapping Systems (MMS), GIS databases, and/or existing maps. Moreover, the automatic matching of linear features, either within overlapping images or between image and object space, is easier than that of distinct points. Finally, linear features possess more semantic information than distinct points because they likely correspond to object boundaries. Such semantics can be automatically identified in the input imagery to facilitate higher-level tasks (e.g., surface reconstruction and object recognition). This research deals with linear features, which might be represented by analytical functions (e.g., straight-line segments) or irregular shapes (also known as free-form shapes), in photogrammetric activities such as:
- Automatic space resection (Figure 1)
- Automatic photogrammetric triangulation and automatic camera calibration (Figure 2)
- Automatics image matching and surface reconstruction (Figure 3)
- Automatic image registration (Figure 4)
- Automatic absolute orientation (Figure 5)
- Automatic registration of medical imagery (Figure 6).
Figure 1: Single photo resection using control linear features (a) while establishing the correspondence with image space features (b)
Figure 2: Straight line before calibration (a) and after calibration (b). Straight dotted lines were added to show the recovery of the straightness property
Figure 3: Left (a) and right (b) images containing matched linear features and the reconstructed 3-D linear feature (c)
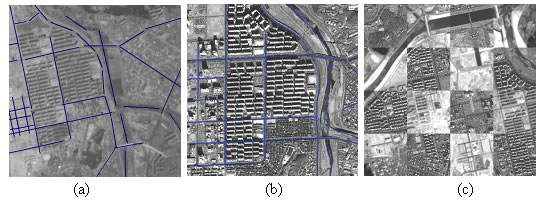
Figure 4: SPOT (a) and IKONOS (b) scenes with digitized linear features, which are used to generate a composite mosaic (c)
Figure 5: SPOT (a) and IKONOS (b) scenes with digitized linear features, which are used to generate a composite mosaic (c)
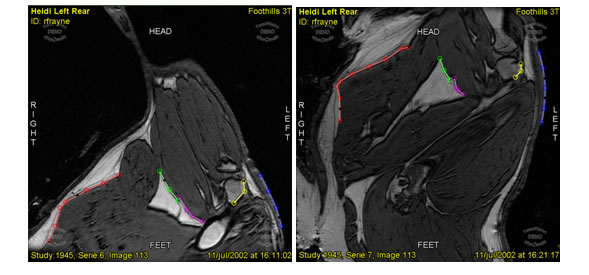
Figure 6: Registration of medical images