Control & Planning under Uncertainty
![]()
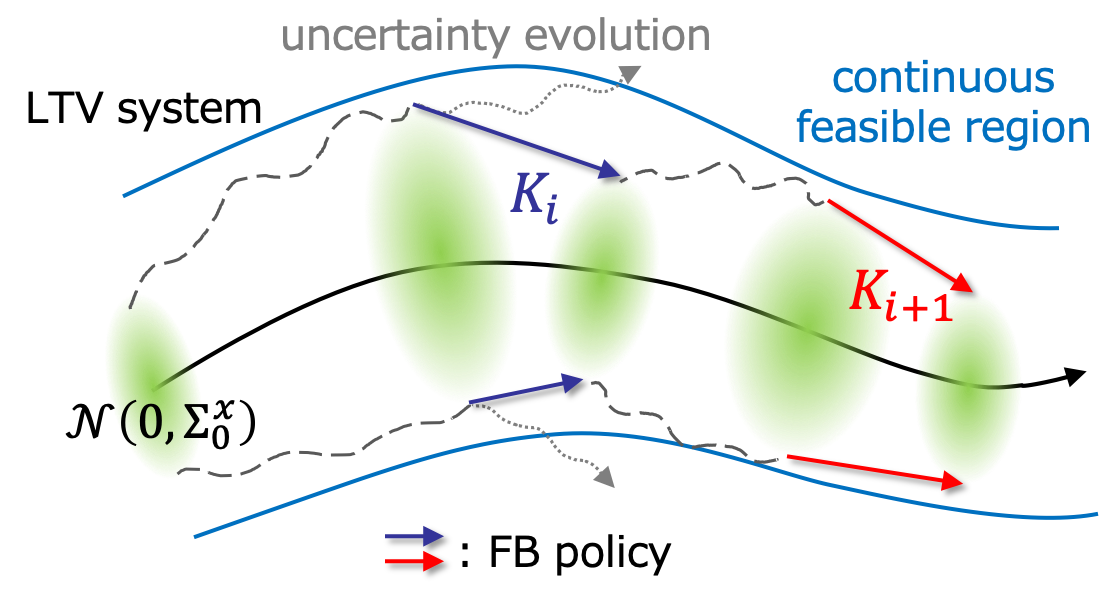
Any real-world system has to operate under uncertainties; the sources of these uncertainties include robot/operator's imperfect knowledge about the state and properties of the systems, control execution errors, and imperfect modeling of the surrounding environment. This research thrust advances the fundamental theories and tools for control and planning of dynamic systems under uncertainty.
Relevant projects:
- Nonlinear chance-constrained optimal control under dynamic uncertainty for safety-critical systems
- Robust on-board spacecraft guidance in cislunar space under uncertainty
- Robust NRHO station-keeping under operational uncertainties
Relevant articles:
-
Robust NRHO Station-keeping Planning with Maneuver Location Optimization under Operational Uncertainties
N. Kumagai and K. Oguri
AAS/AIAA Astrodynamics Specialist Conference, 2023 -
Chance-Constrained Output-Feedback Control without History Feedback: Application to NRHO Stationkeeping
D. Aleti, K. Oguri, and N. Kumagai
AAS/AIAA Astrodynamics Specialist Conference, 2023 -
Convex Optimization over Sequential Linear Feedback Policies with Continuous-time Chance Constraints
K. Oguri, M. Ono, and J. W. McMahon
IEEE Conference on Decision and Control (CDC), 2019 -
Stochastic Primer Vector for Robust Low-thrust Trajectory Design under Uncertainty
K. Oguri and J. W. McMahon
AIAA Journal of Guidance, Control, and Dynamics (JGCD), 2021