Robot Inspector

Professor Mohammad Jahanshahi and PhD student Wen Tang review recently collected data from their robotic agent.
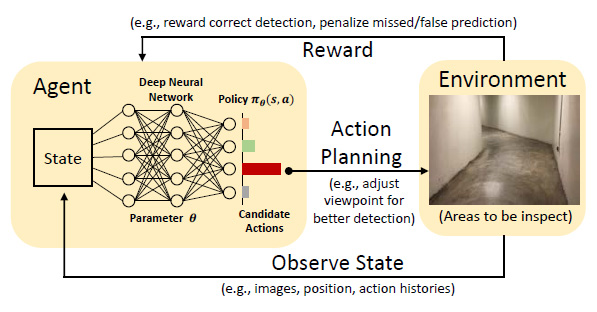
AI-powered agent detects damage in surrounding environment
The age of robotic inspectors is fast-approaching — and Purdue engineers are working to provide them with the knowledge to do so.
Along with his research team, Mohammad Jahanshahi, associate professor of civil engineering, is developing an artificial intelligence-powered robotic agent capable of accurately and robustly detecting damages in its environment. While still in the early stages of development, Jahanshahi said the team has already seen promising results.
“We’re at a very exciting time in our research,” Jahanshahi said. “What we’re working on and developing is completely new but we can already see incredible progress with how our robotic agent is able to learn.”
What sets this robotic agent apart from most AI-based visual detection algorithms, Jahanshahi said, is its ability to actively explore its surroundings using color images. By picking the most informative viewpoints while exploring, the agent can reduce uncertainty and improve its detection results through iterative learning.
“A robotic inspector like this would be perfect for nuclear reactor inspections,” Jahanshahi said. “Instead of manually operating a camera and searching for cracks or other damage, the AI-powered robotic agent could more thoroughly and precisely detect, catalogue, and report what it finds — and in a shorter amount of time.”
As of now, Jahanshahi’s research team reported that active perception exhibits a notable enhancement in crack inspection performance, yielding an increase of up to 40 percent when compared to its raster scanning counterpart given a similar inspection time. Additionally, the proposed method can conduct accurate inspections in about the half the time as other AI-based inspectors.
Wen Tang, a civil engineering PhD student and graduate researcher, said that while considerable progress has been achieved by utilizing state-of-the-art computer vision approaches for damage detection, these approaches are still far away from being used for autonomous robotic inspection systems due to the uncertainties in data collection and data interpretation.
“We’ve had to develop a new way to teach and encourage the AI to learn,” Tang said. “We have been employing positive and negative reinforcements as it learns to properly identify damages. We’ve created a scoring system as well, so that the AI has something to work toward for further encouragement.”
For now, Jahanshahi said, more research and finetuning is required before his team can move forward in their work — but the team is optimistic for the future.
“What we’ve already been able to accomplish has been wonderful,” Jahanshahi said. “Every day the AI gets better. I look forward to where we’ll be by the end of 2023.”