Rigorous versus Approximate Modeling of Linear Array Scanners
Digital frame cameras with resolution and ground coverage comparable to those cameras associated with analogue aerial cameras are not yet available. Therefore, linear array scanners have been introduced on aerial and space borne platforms to overcome this drawback. Linear array scanner scenes are generated by stitching together successively captured one-dimensional images as the scanner moves (Figure 1). Rigorous modeling of these scenes is only possible if the internal and external characteristics of the imaging system (interior orientation parameters and exterior orientation parameters, respectively) are available. This is not usually the case, for example providers of IKONOS scenes do not furnish such information, therefore, in order to obtain the parameters associated with the rigorous model, indirect estimation has to be performed. Space scenes with narrow angular field of view can lead to over-parameterization in indirect methods if the rigorous model is adopted. Earlier research has established that parallel projection can be used as an alternative/approximate model to express the imaging process of high altitude linear array scanners with narrow angular field of view. The parallel projection is attractive since it involves few parameters which can be determined using limited number of ground control points. Moreover, the parallel projection model requires neither the interior nor the exterior orientation parameters of the imaging system (Figure 1). This research outlines different parallel projection alternatives (linear and nonlinear) and it establishes the mathematical relationship between the rigorous model parameters and the parallel projection parameters. The research aims to resampling the space-borne scenes according to epipolar geometry based on the rigorous and/or parallel projection model.
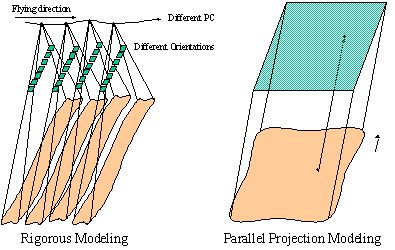
Figure 1: Rigorous and parallel projection modeling of linear array scanners