Research Projects
Current Projects
Robust on-board spacecraft guidance in cislunar space under uncertainty
Sponsor: Purdue University
This project develops an autonomous, on-board guidance framework for robust spacecraft operations within cislunar multi-body dynamical environments. As represented by NASA's Lunar Gateway and Artemis program, cislunar space will be one of the key locations of space exploration in the coming decades. As more spacecraft visit and stay in cislunar space, the capability of autonomous, on-board spacecraft guidance increasingly becomes crucial given the limited bandwidth of communication for ground-based spacecraft operations. Achieving such on-board guidance capability requires addressing multifold technological challenges, including robust maneuver planning under uncertainty, relative and absolute on-board navigation in cislunar space, and real-time algorithm implementation on spacecraft onboard computers with verifiable performance. This project addresses these challenges based on a stochastic optimal control approach that explicitly incorporates the navigation process into robust maneuver planning, ensuring the safety of spacecraft operations under uncertainty (e.g., insertion into target orbits, no collision with the Moon, and no departure from orbits).
Nonlinear chance-constrained optimal control under dynamic uncertainty for safety-critical systems
Sponsor: Purdue University
This project develops a control theoretical framework to achieve robust operations of dynamic systems with formal guarantees of their performance under uncertainty. Such performance guarantees are particularly crucial for safety-critical systems, e.g., aerospace systems and autonomous ground vehicles. Major challenges in providing performance guarantees for real-world systems include the handling of nonlinear dynamical systems under uncertainty (i.e., nonlinear stochastic systems) and the existence of structured uncertainty in the dynamical environments (e.g., non-Gaussian uncertainty). This project aims to advance the theory of chance-constrained optimal control to address these challenges by integrating techniques in the fields of uncertainty quantification and optimal control.
Safe, autonomous on-orbit satellite servicing with risk-aware 6DoF guidance
Sponsor: Purdue University
This project addresses a critical challenge in on-orbit satellite servicing technologies: safe, autonomous operations of servicing satellites. On-orbit satellite servicing technologies, such as on-orbit inspection, refueling, and repairing, increasingly become essential for maintaining and further expanding our activities in space by enabling the reuse and recycle of satellites after their original lifespans. One of the major bottlenecks to promoting such technologies is guaranteeing the safety of satellite operations in the vicinity of other (possibly uncooperative) objects in space while allowing the satellites to operate autonomously. To address this issue, this project develops a novel 6 DoF (i.e., attitude and orbit) spacecraft guidance framework based on stochastic optimal control and demonstrate the framework with high-fidelity dynamical environment simulators incorporating various sources of realistic uncertainty in low-Earth orbits.
Past Projects
Robust Solar Sail Trajectory Design for the NEA Scout Mission
Performed at NASA JPL
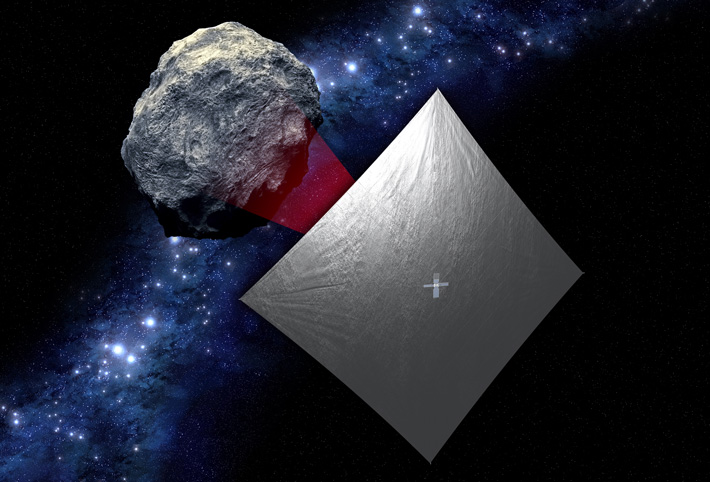
NEA Scout (Image credits: NASA)
This project conducted research on robust solar sail trajectory design under uncertainties for the NEA Scout mission. The NEA Scout mission is a joint effort between NASA's Marshall Space Flight Center (MSFC) and Jet Propulsion Laboratory (JPL). The NEA Scout spacecraft is a 6U CubeSat equipped with a solar sail as the primary means of propulsion to perform a slow flyby of a Near Earth Asteroid (NEA). This project involved participation in the mission design effort to generate solar sail trajectories for NEA Scout that are robust to unplanned safe mode events, as well as orbit determination and maneuver execution errors.
SRP-based orbit control for solar sailing with application to NEA Scout
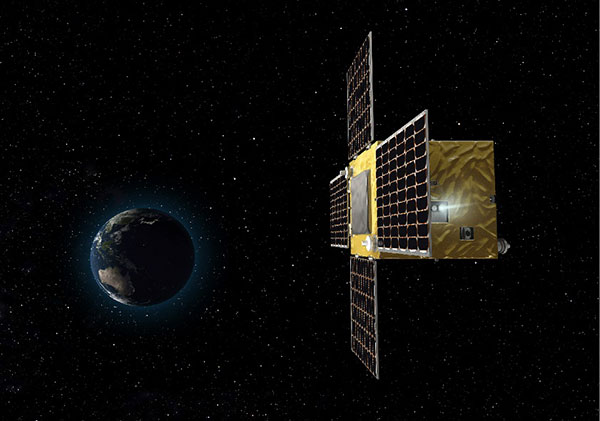
NEA Scout (Image credits: NASA)
With appropriate control algorithms, solar radiation pressure (SRP) can be effectively utilized as a fuel-free orbit control source. Solar sails are one of the promising types of spacecrafts to exploit SRP for interplanetary orbit transfers and proximity operations around asteroids. Such an orbit control concept, termed SRP-based orbit control, shares some features with the well-studied low-thrust orbit control, but differs from it in terms of the control variables and degrees of freedom in the orbit controllability.
This project intends to develop an SRP-based orbit controller for solar sailing mission applications. Interplanetary transfers and asteroid proximity operations using SRP will be considered; developing asteroid close proximity strategies of the NEA Scout mission would be one of the specific applications. Introducing a sophisticated control gain such as the Q-law would further improve the controller performance. In addition, since solar sails are expected to have large uncertainties inherently in their thrust performances, a robust orbit control approach would be also explored.
Investigating non-Keplerian dynamics around Psyche
Performed at NASA JPL

Psyche (Image credits: NASA)
Non-Keplerian dynamics are useful to accurately reproduce the irregular gravity field and other perturbations around small Solar System bodies such as Psyche, the target of the Psyche Discovery mission. However, these non-Keplerian dynamics could dramatically complicate the mission design process of science operations around Psyche. In particular, the attitude-orbit coupled dynamics induced by solar radiation pressure (SRP) and gravitational torque would make the process significantly complicated.
This project intends to investigate the effect of solar perturbations on orbits around Psyche. In addition, exploiting the particular irregular gravity field of Psyche and SRP force will be considered to design convenient orbital paths around Psyche. The hope is to be able to change some orbital elements for free and decrease the propellant requirements of the orbital maintenance and transfers.
Mission design of SmallSat deep-space exploration
Performed at JAXA Institute of Space and Astronautical Science (ISAS)

Left: EQUULEUS, right: PROCYON (Image credits: JAXA)
This project is focused on the mission design of SmallSat-based deep-space exploration missions at JAXA, including Equilibrium Lunar-Earth point 6U Spacecraft (EQUULEUS) and Proximate Object Close Flyby with Optical Navigation (PROCYON). EQUULEUS is a CubeSat mission to explore cislunar space, to be launched onboard NASA's Artemis I. For EQUULEUS, our work leverages the multi-body dynamical structure in cislunar space to efficiently design low-energy transfers with multiple lunar flybys to an Earth-Moon libration point in an ephemeris model. We also developed a systematic approach to design many number (> 13,000) of quasi-halo science orbits and to assess their station-keeping cost, which contributed to the complex mission design in the cislunar multi-body regime with constrained launch conditions. PROCYON is a 50-kg class SmallSat launched together with Hayabusa2 in 2014. For PROCYON, we developed flight GNC software of the spacecraft that demonstrated the deep-space exploration capability as a SmallSat for the first time.