Cooperative Driving Automation
Connected Vehicle-Based Multi-Modal Signal Control
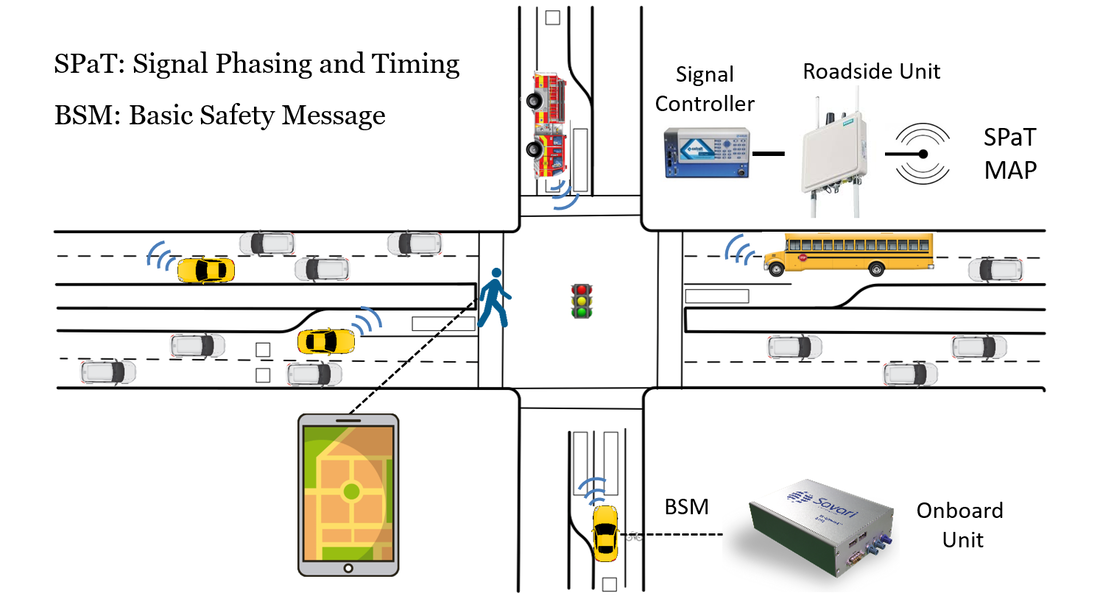
Connected vehicle (CV) based multi-modal signal control system, which utilizes CV trajectory data under different penetration rates as input. Traffic estimation models are built to estimate states of regular vehicles based on CV data. Then optimization problems are formulated and solved to adjust signal timing dynamically and provide priority to multi-modal road users including cars, emergency vehicles, transit vehicles and pedestrians.
Related Publications:
Feng, Y., Head, K.L., Khoshmagham, S.., Zamanipour, M. 2015. A Real-time Adaptive Signal Control in a Connected Vehicle Environment. Transportation Research Part C: Emerging Technologies. V55, 460-473.
Zamanipour, M., Head, K.L., Feng, Y., Khoshmagham, S., 2016 Efficient Priority Control Model for Multi-Modal Traffic Signal. Transportation Research Record. Vol. 2557, pp. 86-99
Feng, Y., Zamanipour, M., Head, K.L., Khoshmagham, S., 2016. Connected Vehicle Based Adaptive Signal Control and Applications. Transportation Research Record. Vol. 2558, pp. 11-19.
Beak, B., Head, K.L., Feng, Y.. Adaptive Coordination Based on Connected Vehicle Technology, 2017. Transportation Research Record. Vol. 2619, pp. 1-12.
Feng, Y., Zheng J., and Liu, H.X.. 2018. A Real-time Detector-free Adaptive Signal Control with Low Penetration of Connected Vehicles. Transportation Research Record. Vol. 2672(18) 35-44.
Spatiotemporal Intersection Management
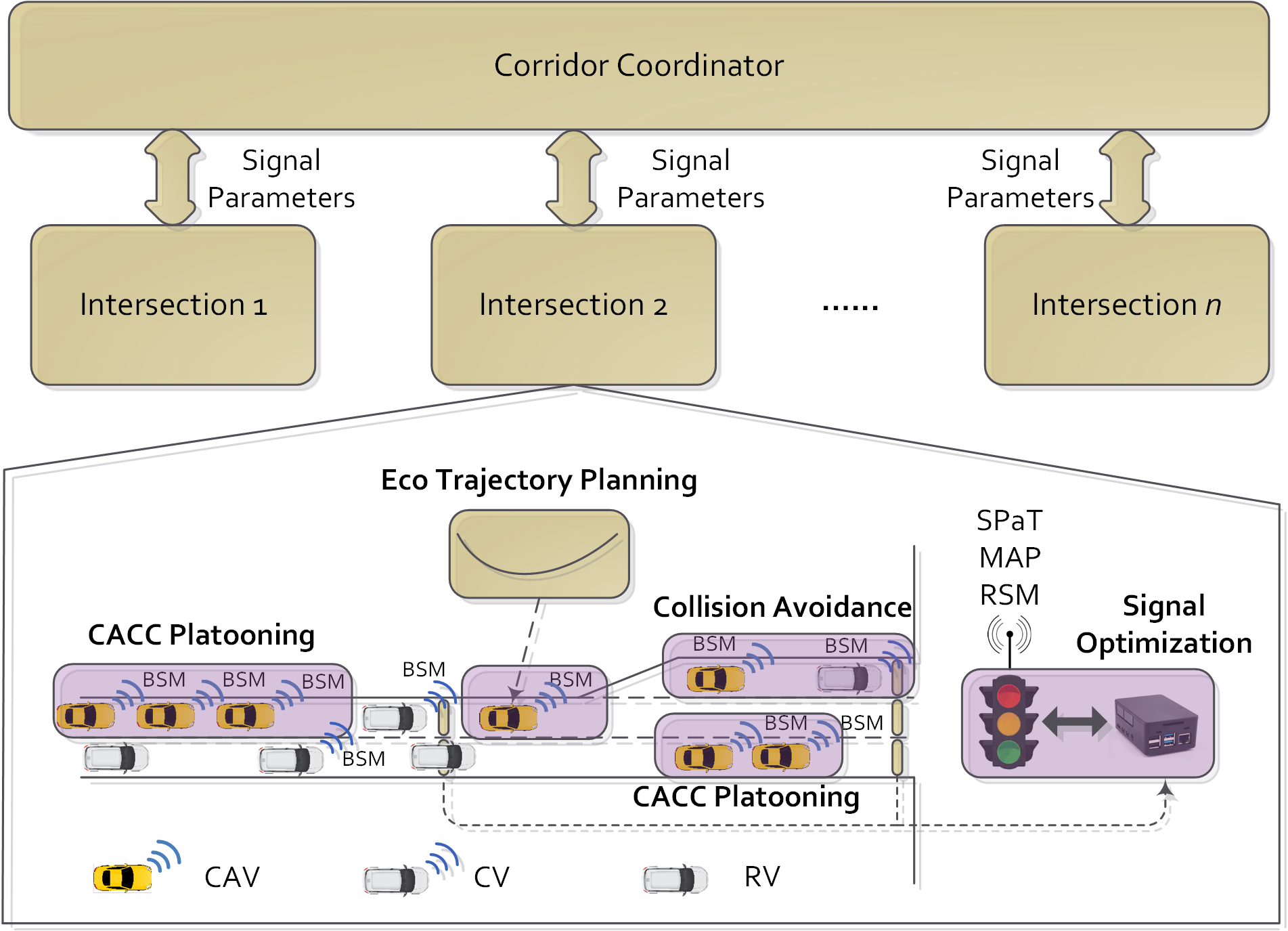
Connected and automated vehicles (CAVs) not only act as floating sensors, but can act as actuators to influence traffic flow. The proposed spatiotemporal intersection management scheme simultaneously optimize traffic signal parameters as well as CAV trajectories. The system mobility can be improved through CAV platooning and better utilization of green time at the intersection. In addition, fuel consumption and emission can be reduced due to smoothed vehicle trajectories.
Related Publications:
Feng, Y., Yu, C., Liu, H.X., 2018. Spatiotemporal Intersection Control in a Connected and Automated Vehicle Environment. Transportation Research Part C: Emerging Technologies. V89, 364-383.
Yu, C., Feng, Y., Liu, H.X., Ma W., and Yang X., 2018. Lane-based integrated optimization of traffic signals and vehicle trajectories at isolated urban intersections. Transportation Research Part B: Methodological. V112, 89-112.
Yang, Z., Feng, Y., Gong, X., Zhao, D., and Sun, J., 2019. Eco-trajectory Planning with Consideration of Queue Along Congested Corridor for Hybrid Electric Vehicles. Transportation Research Record. Vol. 2673(9) 277-286.
Yu, C., Feng, Y., Liu, H.X., Ma W., and Yang X., Corridor Level Cooperative Trajectory Optimization with Connected and Automated Vehicles. 2019. Transportation Research Part C: Emerging Technologies. V105, 405-421.
Yang, Z., Feng, Y., and Liu, H.X., A Cooperative Driving Framework for Urban Arterials in Mixed Traffic Conditions. 2021. Transportation Research Part C: Emerging Technologies. 124, p.102918.