Intelligent Vehicle Testing and Evaluation
Augmented Reality Testing Environment
One limitation of closed CAV testing facilities is that they merely provide empty roadways, in which testing CAVs can only interact with a limited number of other CAVs and infrastructure. We design and build an augmented reality environment for CAV testing and evaluation. A real-world testing facility (i.e., Mcity) and a simulation platform are combined together. Movements of testing CAVs in the real world are synchronized with simulation and information of background traffic is fed back to testing CAVs. Testing CAVs can interact with virtual background traffic as if in a realistic traffic environment. The proposed system mainly consists of three components: a simulation platform, testing CAVs, and a communication network. Testing scenarios that have safety concerns and/or require interactions with other vehicles can be performed. Two exemplary test scenarios are designed and implemented to demonstrate the capabilities of the system.

Check out our demo video on YouTube:
Related Publications:
Feng, Y., Yu, C., Xu, S., Liu H.X., and Peng, H.. An Augmented Reality Environment for Connected and Automated Vehicle Testing and Evaluation. The 29th IEEE Intelligent Vehicle Symposium, Changshu China, 2018.
Testing Scenario Library Generation
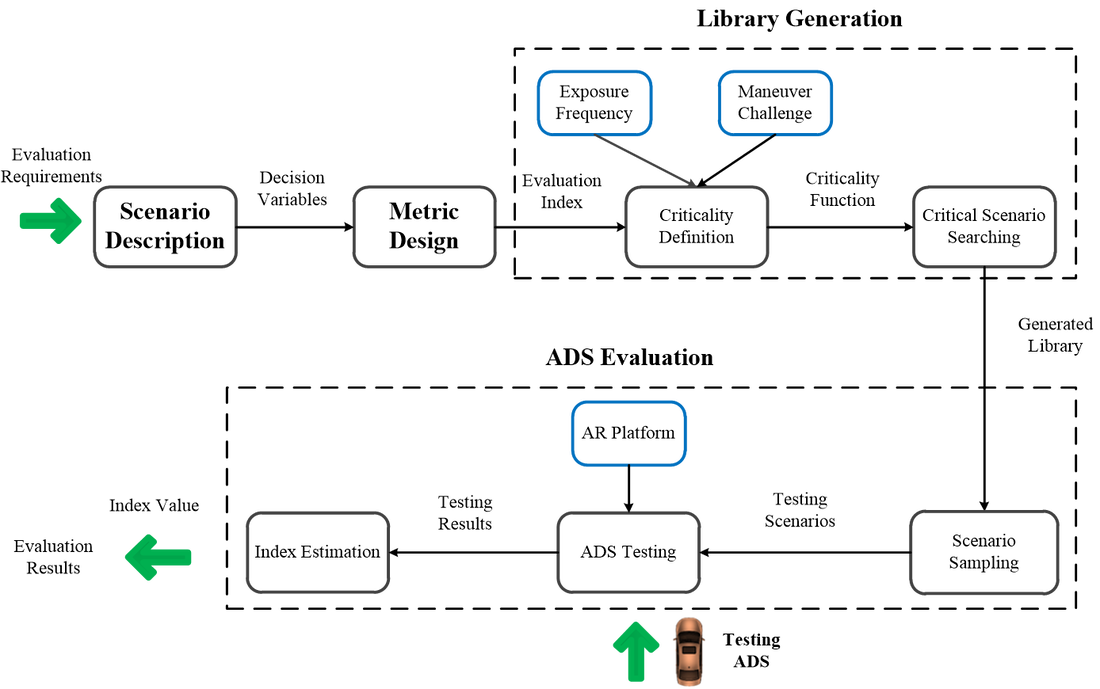
Due to very complex naturalistic driving environments, it is impossible to enumerate all scenarios during the CAV testing and evaluation process. How to generate critical testing scenarios to efficiently and accurately evaluate CAV becomes a challenge. To address this challenge, we propose a new evaluation method, which generates a testing scenario library consisting of critical scenarios, to accelerate the evaluation process. A new definition of scenario criticality is proposed, which considers both exposure frequency and maneuver challenge. Furthermore, we integrate the testing scenario library generation method with the augmented reality (AR) testing environment. This new evaluation framework from scenario generation to AR based testing sets a foundation for CAV safety and functionality assessment.
Related Publications:
Feng, S., Yan, X., Sun, H., Feng, Y., and Liu, H.X., Intelligent Driving Intelligence Test for Autonomous Vehicles with Naturalistic and Adversarial Environment. 2021. Nature Communications. 12(1), pp.1-14.
Feng, S., Feng, Y., Sun, H., Zhang, Y., and Liu, H.X., Testing Scenario Library Generation for Connected and Automated Vehicles: An Adaptive Framework. 2020. IEEE Transactions on Intelligent Transportation Systems.
Feng, S., Feng, Y.,* Yan, X., Shen, S., Xu, S., and Liu, H.X., Safety Assessment of Highly Automated Driving Systems in Test Tracks: A New Framework. 2020. Accident Analysis and Prevention. V144, 105664
Feng, S., Feng, Y., Sun, H., Bao, S., Zhang, Y., and Liu, H.X., Testing Scenario Library Generation for Connected and Automated Vehicles, Part II: Case Studies. IEEE Transactions on Intelligent Transportation Systems. 2020
Feng, S., Feng, Y., Yu, C., Zhang, Y., and Liu, H.X., Testing Scenario Library Generation for Connected and Automated Vehicles, Part I: Methodology. 2020. IEEE Transactions on Intelligent Transportation Systems. 2020.