CART lab collaborates with Mcity to conduct the first remote testing of autonomous vehicles in a mixed reality environment
CART lab collaborates with Mcity to conduct the first remote testing of autonomous vehicles in a mixed reality environment
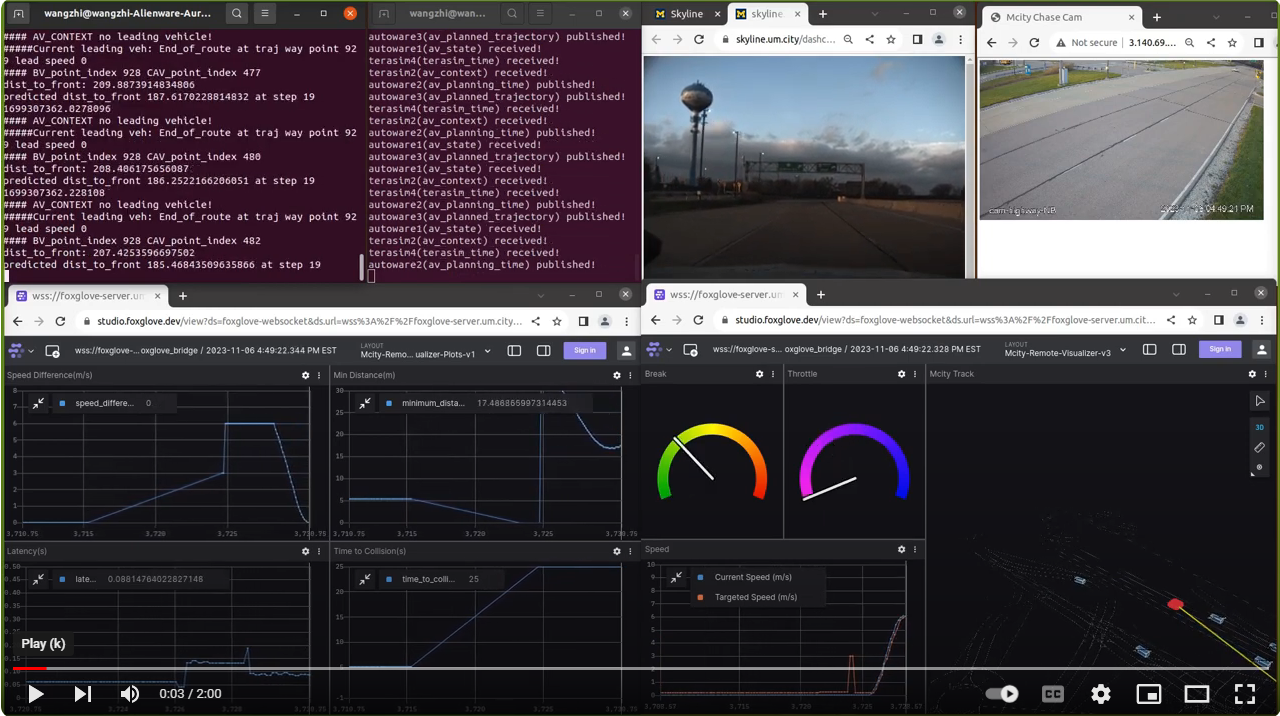
The CART lab (Wangzhi Li and Julia Chen) collaborates with Mcity at University of Michigan to conduct the first remote testing of autonomous vehicles (AV) in a mixed reality (MR) environment. The AV motion planning algorithm developed by the CART lab is running at Purdue campus while controlling a real AV in the Mcity test facility. Meanwhile, the real AV is interacting with virtual background vehicles generated from a simulation platform hosted at AWS. The top left view shows the execution of the AV motion planning algorithm and the communication messages. The top right view shows the AV’s onboard camera and chasing cameras installed at Mcity facility. The bottom left view shows real-time performance metrics in terms of mobility, safety, and communication latency. The bottom right view shows real-time AV status including throttle, brake, current speed, target speed, and its interactions with virtual background vehicles.
A video demo can be found at: Remote Testing
A detailed story can be found at: Michigan Engineering News