Research
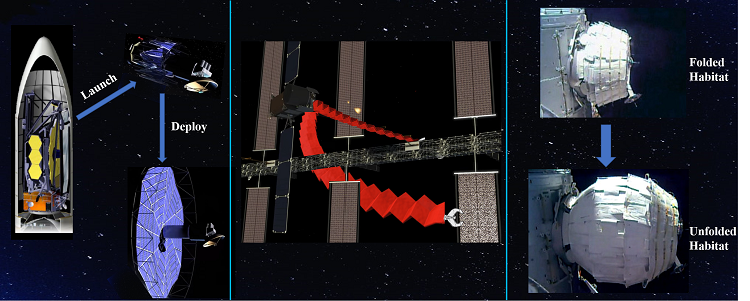
Transformable Robotic Systems for Space Operations
Research Description Origami-inspired structures that fold flat sheets along creases with designed patterns to create transformable structures have been widely applied in science and engineering, especially in space operations for reduced mass, volume saving, and in-situ adaptability. This project aims to develop an autonomous origami-inspired transformable system by leveraging mixed technologies in control, optimization, and design to enable high-performance deformation maneuvering in space operations requiring frequent and/or time-responsive shape changes.
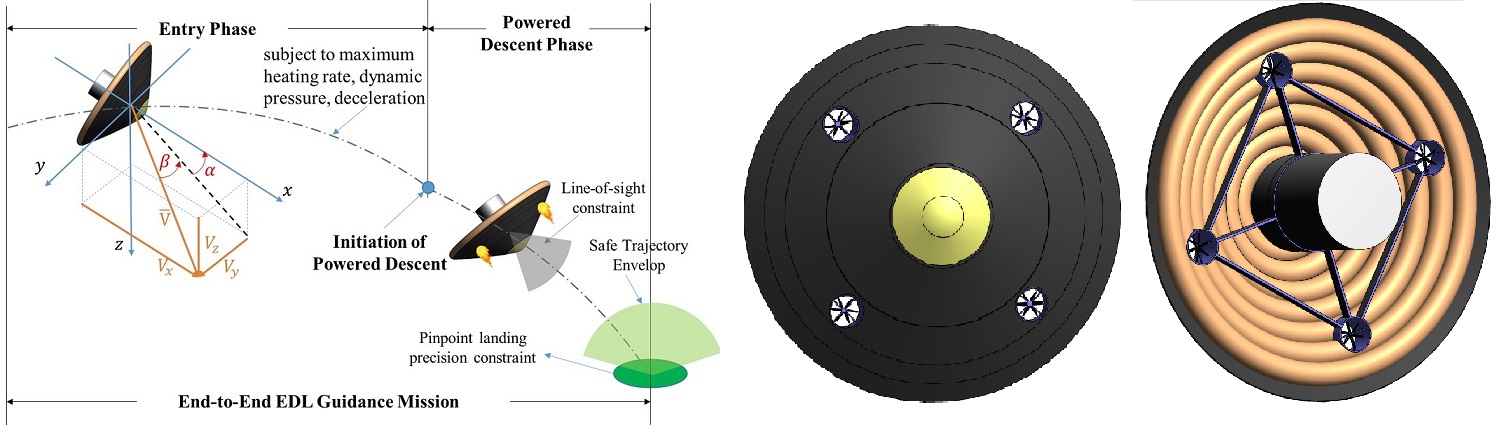
Human-Mars Entry, Powered Descent and Landing Guidance
Research Description A human-Mars mission requires the delivery of a high payload from the entry interface at supersonic speed to a preflight-designated surface location at near-zero speed with pinpoint precision. The supersonic retro-propulsion system to decelerate the vehicle at supersonic speed consumes significant amount of propellant. It becomes a challenging task to achieve high precision landing while minimizing fuel consumption during descent phase. We aim to develop a highly implementable guidance approach that optimizes the end-to-end complete entry, powered descent, and landing (EDL) trajectories in real-time toward the fuel-optimal and precise landing. We are also building an experimental testbed inspired by the Hypersonic Inflatable Aerodynamic Decelerator (HIAD) to mimic the entry and powered descent operations. [Details]

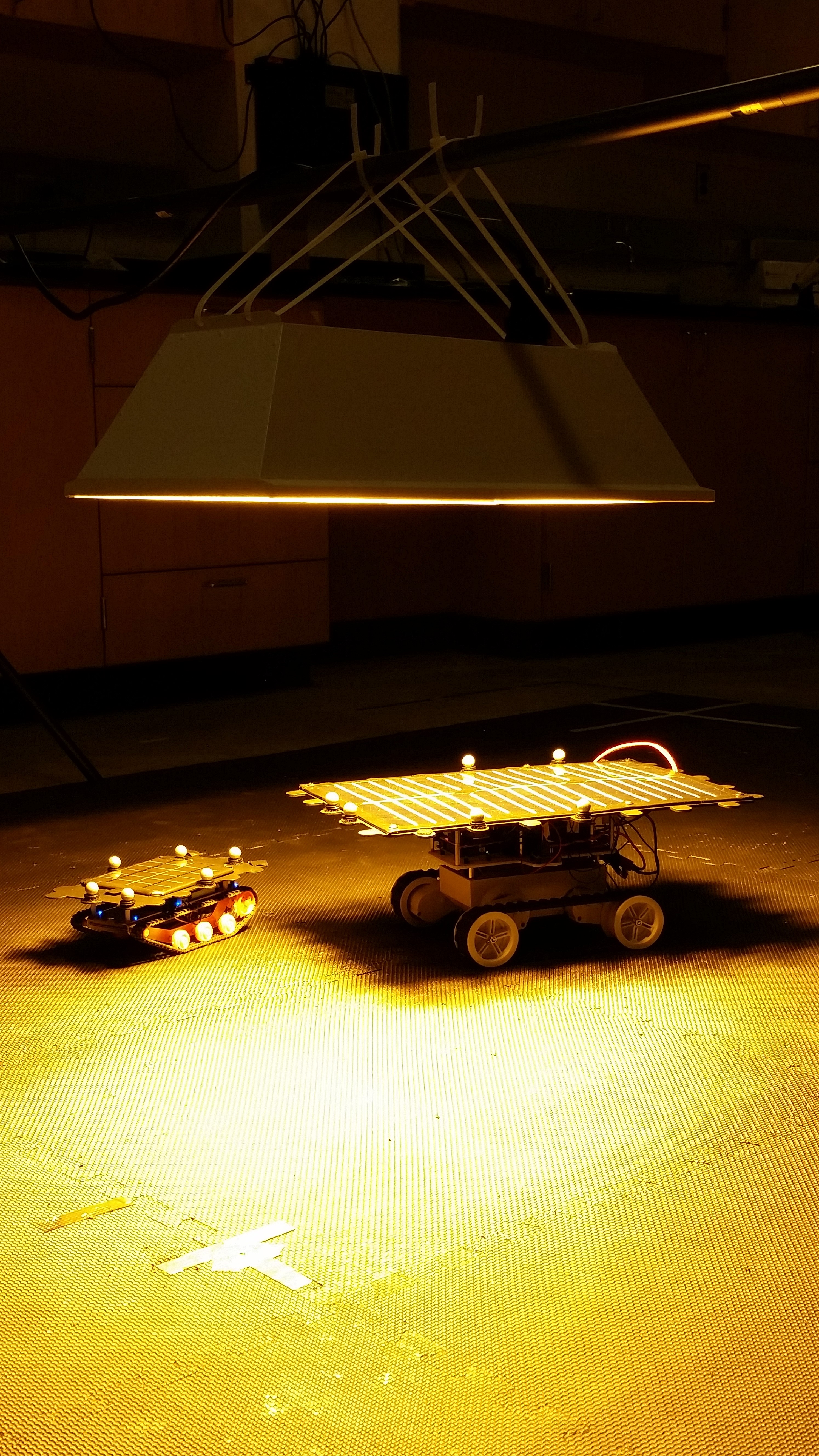
Solar-Powered Robotic Systems for Long-Term Operation
Research Description The integration of renewable energy, e.g., solar energy or wind energy, as the power source in aerial or ground vehicles is intended to extend the vehicle endurance time with a high payload. Objective of this project is to develop next-generation solar-powered robotic systems that integrate heterogeneous aerial and ground vehicles to achieve long-duration high-efficiency operations for missions across wide areas. The ultimate goal is to actively exploit renewable solar energy from the environment to overcome time and distance limitations for long-duration unmanned missions while also reducing the environmental impact of robotic systems. [Details]

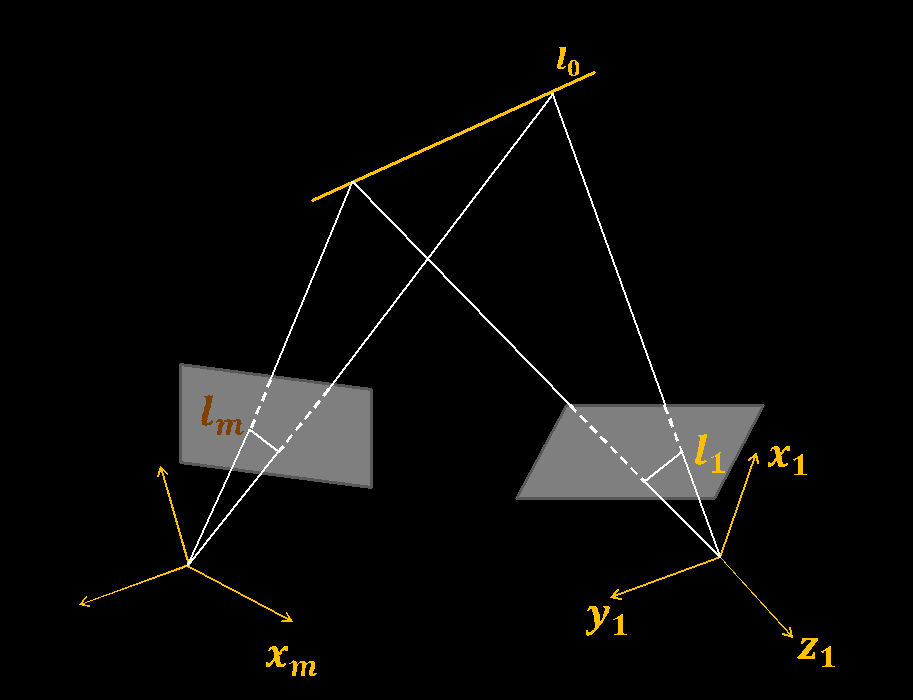
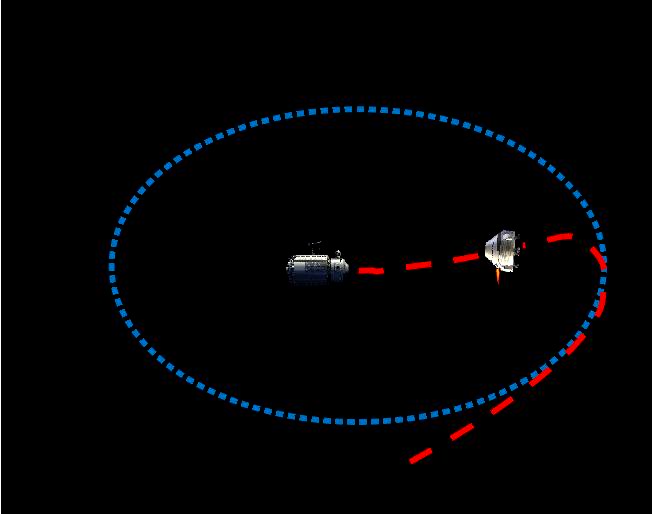
Space Object Motion Estimation and Autonomy of Proximity Operations
Research Description A number of space missions depend on accurate estimation of the relative motion of space objects and high autonomy of proximity operations. Examples include rendezvous, formation flight, debris avoidance and asteroid capture. However, for space objects flying with high translational and rotational speed, it is challenging, yet essential, to estimate and control their relative motion when realizing autonomous/semiautonomous operations. In this project, by establishing a dual quaternion based new modeling paradigm, our goal is to develop an integrated motion estimation and optimal control strategy to advance the autonomy level of proximity operations. [Details]
Rank-Constrained Semidefinite Programming for Nonconvex Optimization
Research Description A wide range of optimization problems have a nonconvex objective function, nonconvex constraints, or both. However, no uniform approach currently exists for solving these optimization problems with assured convergence or even attainment of a feasible solution. Among these problems, rank-constrained optimization problems have received increasing attention due to their extensive applications in areas such as signal processing, model reduction, and system identification. Rank-constrained optimization of a convex function is subject to a convex set of constraints and a rank constraint on an unknown matrix. Although rank-constrained optimization is recognized as one type of important problem, the connection between this problem and a large number of representative nonconvex optimization problems has not been realized. In fact, many classes of nonconvex optimization problems can be equivalently transformed into rank-constrained optimization problems. This work develops a systemic rank-constrained programming methodology to solve a broad class of nonconvex optimization problems. [Details]
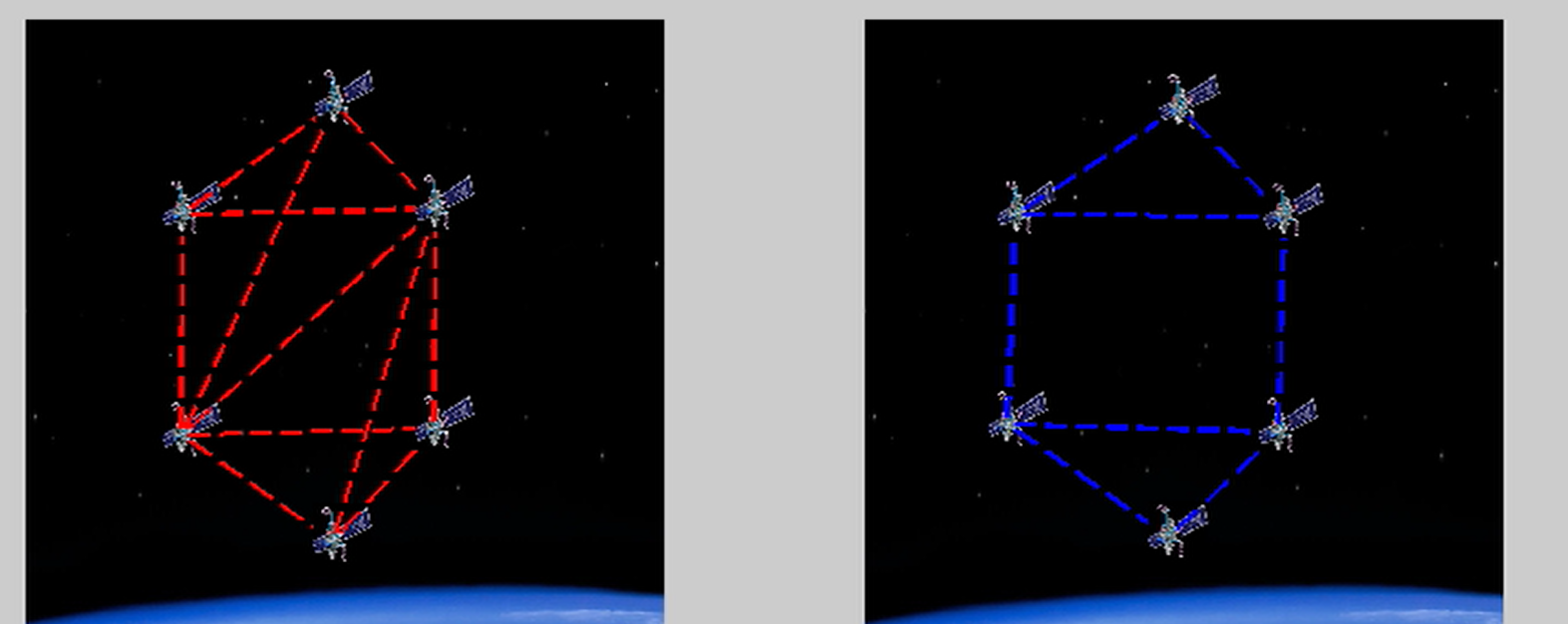
Dynamic Network Design, Identification, and Control
Research Description A wide range of networks are evolving along time, which makes it challenging to generate time-critical control strategies that depend on understanding of the interaction relationships and models describing time behaviors of controllable entities. This work aims to develop computational approaches to interpret and regenerate structured data for design, identification, and control of dynamic networks. The unified method for data construction and analysis is expected to be applicable to a variety of network systems, ranging from sensors, multi-agent robotic, social, and biological systems. [Details]
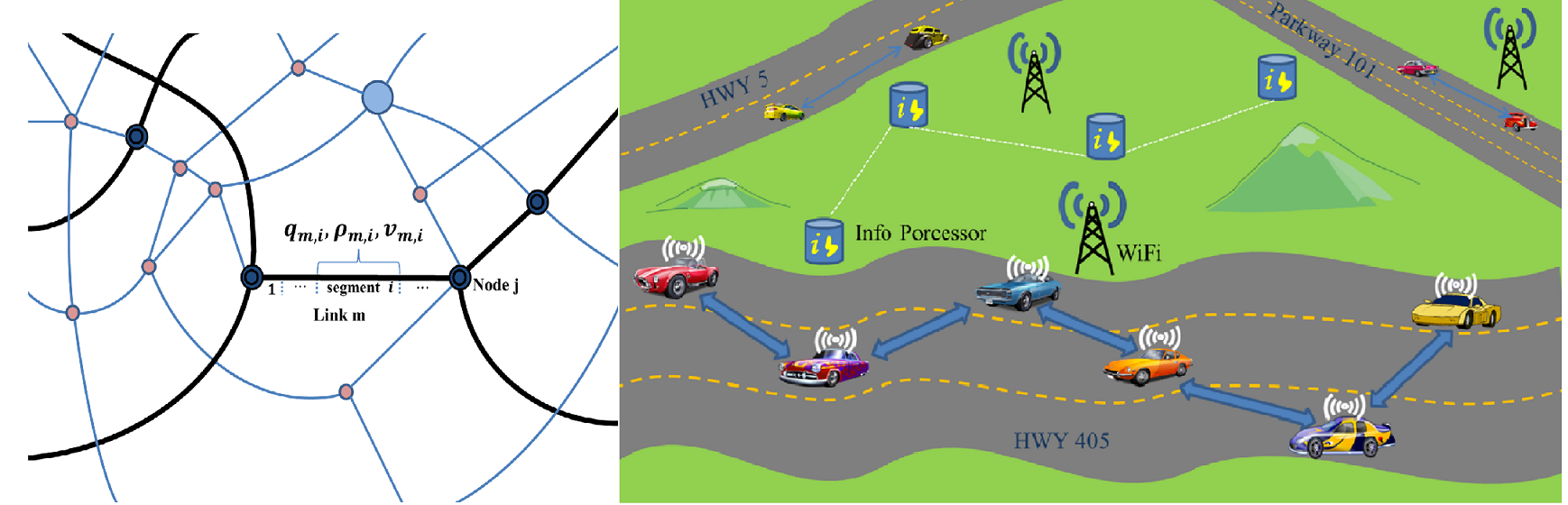
Distributed Traffic Control for Reduced Fuel Consumption in Transportation Networks
Research Description Current technology in traffic control is limited to centralized approach that has not paid appropriate attention to efficiency of fuel consumption and is subject to the scale of transportation networks. This project proposes a transformative approach to the development of a distributed framework to reduce the balanced fuel consumption and travel time through hybrid control on speed limit and ramp metering rate. It integrates the roadway infrastructures that equipped with sensing, communication, and parallel computation functionalities in the new traffic control paradigm. Going beyond the existing distributed architectures where precise dynamic flow models and fuel consumptions have not been considered, work in this project will generate traffic control strategies to realize real-time macroscopic level traffic regulation with high precision. [Details]