Autonomy of Origami-inspired Transformable Systems in Space Operations
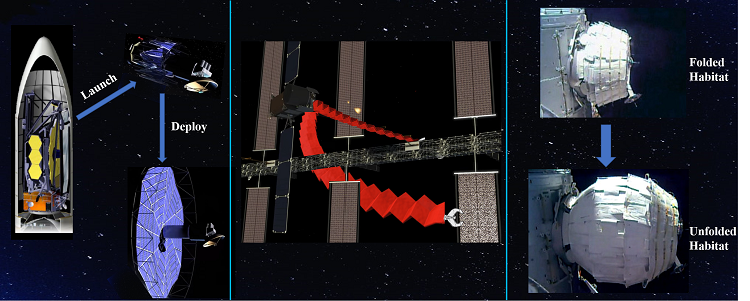
Research Description Origami-inspired structures that fold flat sheets along creases with designed patterns to create transformable structures have been widely applied in science and engineering, especially in space operations for reduced mass, volume saving, and in-situ adaptability. This project aims to develop an autonomous origami-inspired transformable system by leveraging mixed technologies in control, optimization, and design to enable high-performance deformation maneuvering in space operations requiring frequent and/or time-responsive shape changes.