Research
This testbed enables research on reliable and secure, large-scale CPS and IoT systems. Some sample projects that this testbed enables are:
1. Army Research Lab (ARL): "Consensus under Energy Constraints for Dynamic Distributed Cyber-Physical Systems", 2019-22
2. National Science Foundation (NSF): "Secure CPS for Real-time Agro-Analytics", 2020-23 (Cyber-Physical Systems Program)
Abstracts
1. Army Research Lab project
Defense applications often rely on dynamic distributed cyber-physical systems (CPS) to provide the eyes and the ears in a military environment. These are used for sensing the environment, for situational awareness, and in cases, for actuation, such as, kinetic engagement. These devices are playing an increasingly important role in a networked setting for autonomous tasking and mission planning. Since they are embedded in the battlefield or placed in other hazardous environments, they operate under malicious attacks and challenging communication environments. In several scenarios, the network of CPS devices have to coordinate to aid in a mission and such coordination happens through message passing among the devices. There is a requirement that such coordination be achieved even in the face of malicious attacks and degraded communication (such as, lack of connectivity between sets of devices). We aim to solve this problem in this project, while ensuring that our distributed protocol is energy efficient. We propose to achieve this through the use of distributed consensus protocol that we will design specifically for the wireless-enabled CPS devices and taking advantage of the network effect of these devices. The protocol may use of Blockchain based consensus, with appropriate modification for the energy constrained environment. Our discoveries will be instantiated in a testbed of embedded devices with a variety of wireless connectivity modules, which will be subject to induced error conditions and attacks.
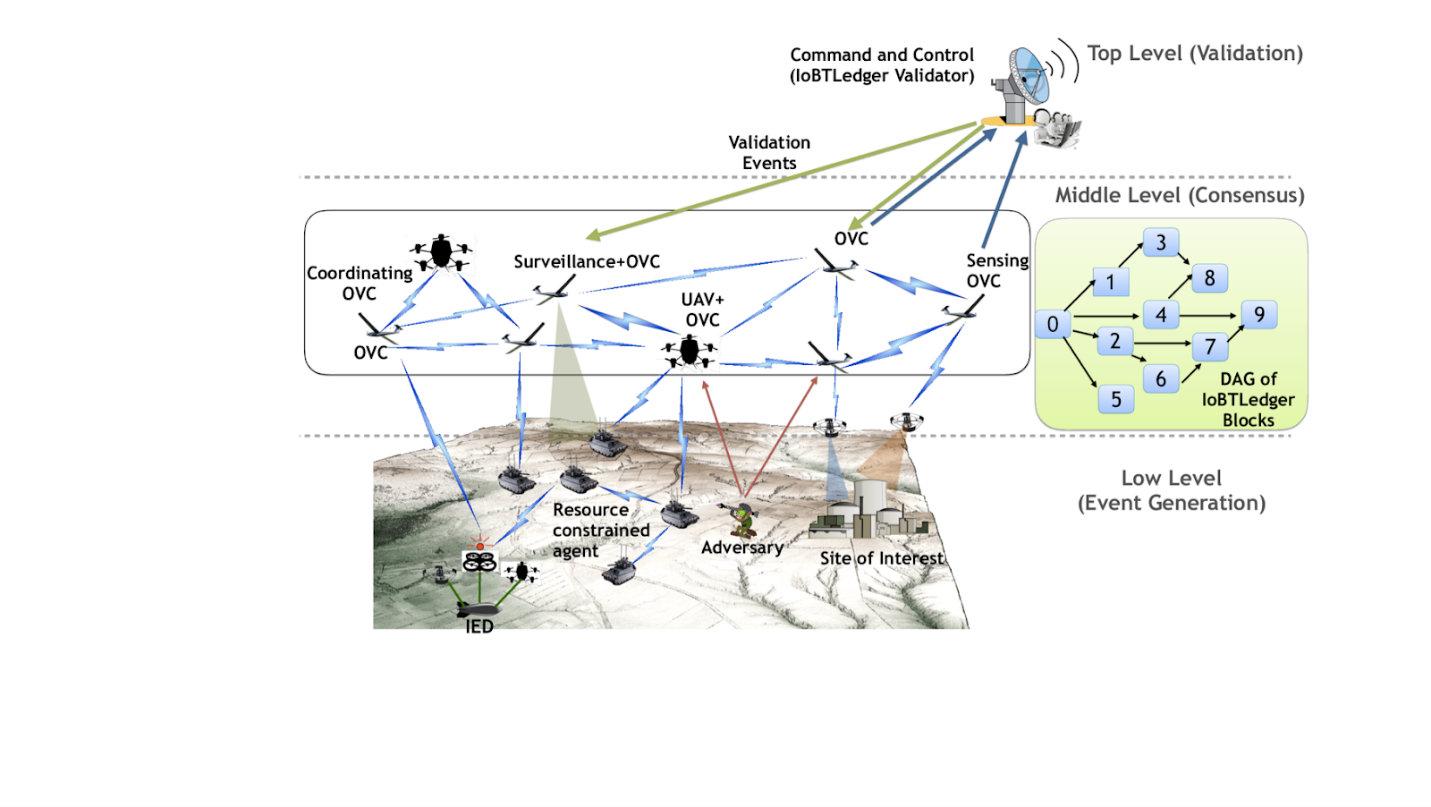
Figure 1. Schematic of an autonomous battlefield environment showing embedded/CPS nodes of various capabilities participating in making autonomous decisions. Our solutions will enable these heterogeneous nodes to arrive at consensus despite the presence of malicious entities and of network partitions.
2. National Science Foundation project
Cyber-physical systems (CPS) have now started to play an increasingly important role in autonomous sensing, analysis, and tasking in a variety of agricultural settings ranging from sustainable farming to livestock monitoring. Many of these settings demand real-time analytics, at varying timescales, and the CPS devices have to coordinate among themselves over a variety of wireless networks. As various actors in these settings—from farmers to big agro companies—have much to gain from manipulating the results of these distributed systems, it is important to make these systems fault-tolerant and secure. This project, COPIA, seeks to provide the fundamental secure distributed computing primitives tailored for real- time agro-analytics in the face of malicious faults.
Despite more than four decades of work on secure distributed computing, this CPS domain introduces new requirements that COPIA will address through fundamental innovations. First, COPIA will incorporate a principled framework for comparing energy costs of protocols and deriving optimal choices of cryptographic primitives to optimize energy use. This framework will permit leveraging CPS-specific opportunities, e.g., the difficulty for an adversary to equivocate due to the omnidirectional nature of wireless links. Second, COPIA will achieve consensus in dynamic networks, i.e., where CPS nodes are mobile (e.g., drones). The technical challenge here is that the communication graph of nodes dynamically changes; most existing work assumes graph connectivity is unchanging throughout the execution of the protocol. Third, COPIA will address privacy in these distributed computing protocols, as the farmers are increasingly worried about companies extracting trade secrets from sensor data. This thrust involves hardening distributed computing protocols so that a limited number of node compromises does not divulge secrets.
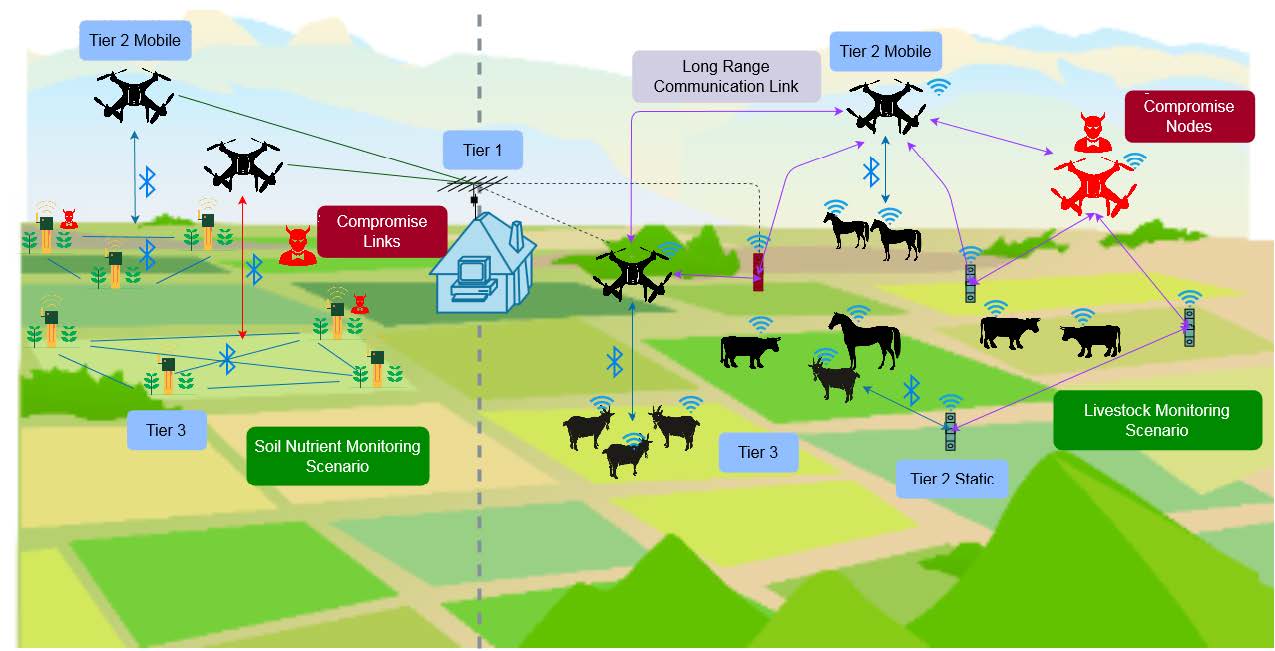
Figure 2: A high-level schematic of multi-tier CPS scenarios in COPIA. For the soil monitoring scenario on the left, we propose that Tier 3 nodes on the ground communicate with each other in real-time (blue lines) to perform consensus, and then offer aggregate information back to the infrequent drones (Tier 2 nodes). For the livestock monitoring scenario, Tier 3 nodes are attached to the animals and so are very light-weight. Tier 3 nodes are not expected to communicate with other; however, instead they offer data to static communication gateways (Tier 2S nodes) and/or mobile drones (Tier 2M nodes). Tier 2 nodes communicate with each other over long-range communication (Purple) channels. In COPIA, the Tier 2M nodes perform dynamic (approximate) consensus, and we will also explore two-tier consensus across the Tier 2S and Tier 2M nodes. Adversaries can compromise nodes and links.