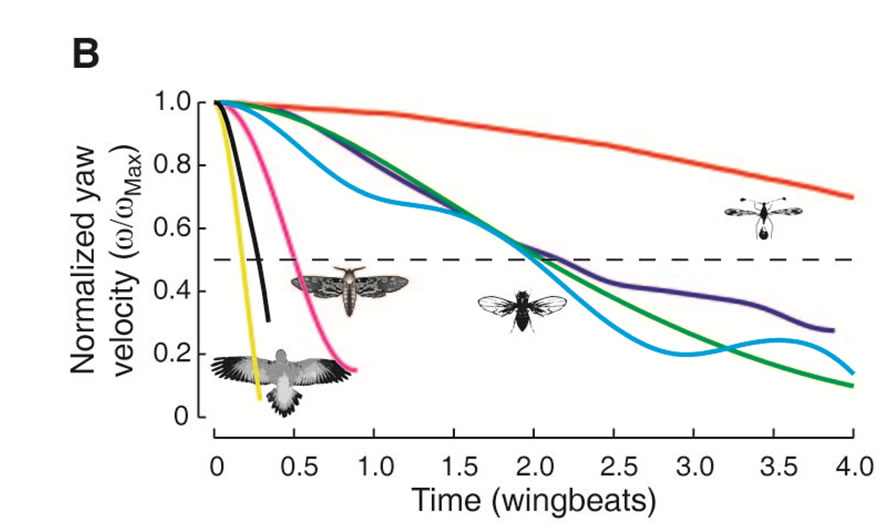
In studying the combined effects of body motion and wing flapping, we discovered that wing flapping induces inherent counter forces/torques opposite to the direction of motion and proportional to the body velocity and wingbeat frequency. We termed them Flapping Counter Torques (FCTs) and Flapping Counter Forces (FCFs), and they dominates fast maneuvers for animals large and small. We also showed that increasing wingbeat frequency enhance both maneuverability and stability in flapping flight. (ICRA, Science, JEB, and TRO papers). Our finding was also reported in a Science Perspective article and other media reports.
We further developed the dynamic models of flapping flight in hover, performed stability analysis and flight control. (TRO, DSCC, ACC, and JRM papers).
A hummingbird making a sharp turn (shot at 30fps)
Passive damping dominates deceleraton in turning.
Flapping Counter Force principles.
Active Control for Disturbance Rejection
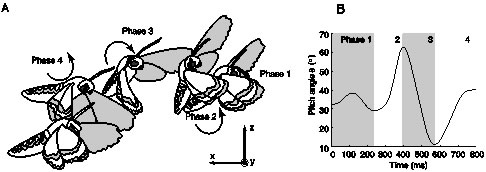
In this project, we study how flying animals use active control to recover from disturbances. We found that during disturbance recovery, hawk moths produce active pitch torque via changes in wing rotation angle. Comparison of closed-loop and open-loop dynamics showed that they rely largely on passive damping to reduce body translation but use feedback control for orientation recovery. The resulting feedback control is able to remain stable with sensory delays of two wingbeats. (JEB paper, 2011 JEB Outstanding Paper Prize Finalist).
A hawkmoth recover from pitch instability
Active control is employed in all four stages of attitude stabilization.
Flight Dynamics, Stability, and Control
Simulation of a fly recovering from upside-down.
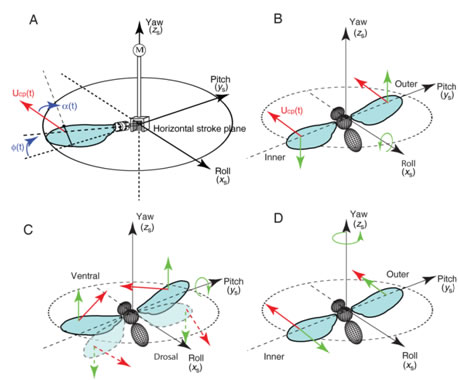
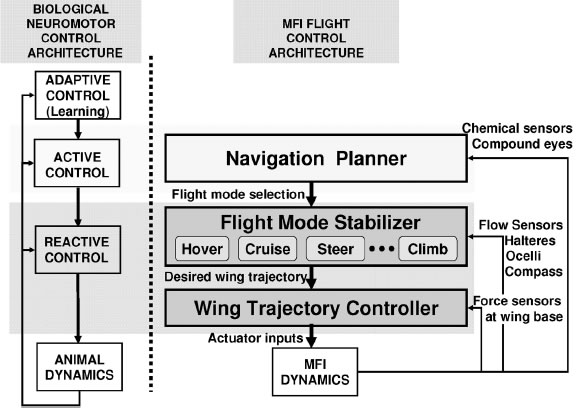
We developed the system models of flapping wing inch-size micro air vehicles (MAVs). The model includes wing-thorax, aerodynamics, body dynamics, and biomimetic sensors such as ocelli, halteres, magnetic compass, and optical flow sensors. The models are developed based on biological principles, analytical models, and experimental data. Flight control algorithms based on a hierarchical architecture and averaging theory is applied for hovering stabilization based on sensory feedback. (TRO model and control papers and previous ICRA papers).
Bio-robotics Laboratory
School of Mechanical Engineering,
Purdue University,
West Lafayette, IN 47907
Email: xdeng@purdue.edu Phone: 765-494-1513 Fax:765-496-7537