
|
| HOME | RESEARCH | PEOPLE | PUBLICATION | IMAGES & VIDEOS | EQUIPMENT | NEWS&MEDIA | FUNDING |
|
Tow Tanks and Mechanical Model Wings | ||||||||||||
| Our lab is equipped with two tow tanks and four pairs of robotic model wings to perform low Re aerodynamic expeirments. The tanks are equipped with linear stage to enable translation along the tank length to simulate forward flight. A six component force/torque sensor (ATI Nano 17) is mounted at the base of the wing to measure instantaneous aerodynamic forces. | |||||||||||||
| Verticle flappers with three DOF wing joint: flapping, rotation, and deviation. | Flappers with additional elbow joint to achieve high stroke plane angle such as dragonfly. | ||||||||||||
| Low Speed Wind Tunnel | |||||||||||||
 |
We designed and built a customized low speed wind tunnel with frontal and side wind gust capabilities. The wind tunnel is constructed with modular test sections with varying sizes. A force balance is mounted in the test section to measure instantaneous aerodynamic forces, along with PIV measurements. | ||||||||||||
| Particle Image Velocimetry (PIV) Systems | |||||||||||||
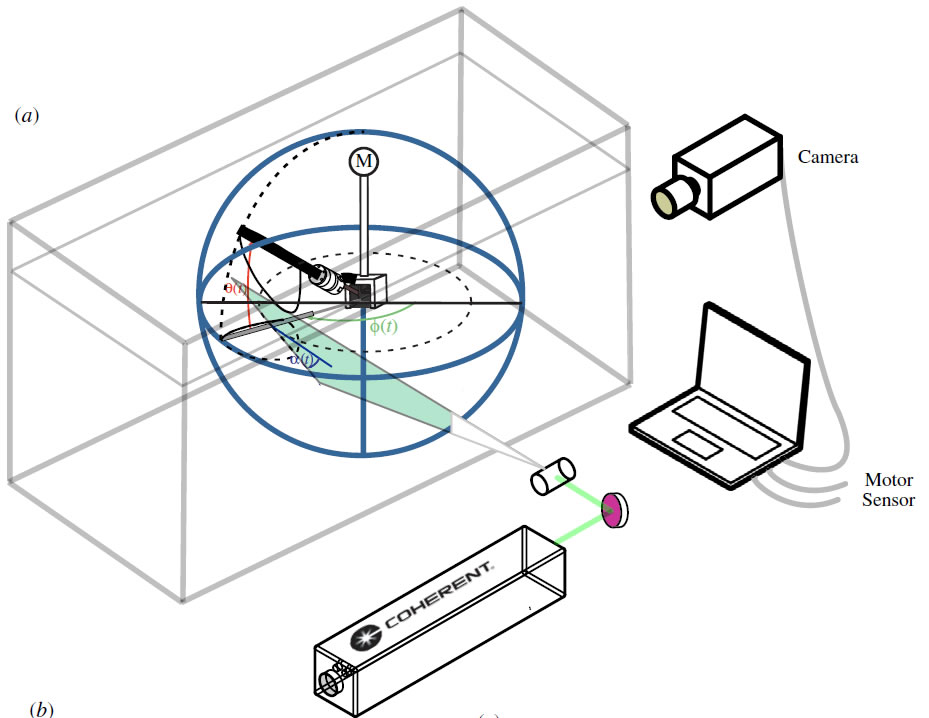
| Our lab is equipped with two sets of PIV systems: one uses high speed camera and a continous laser for flow visualization, and the other is a stereo PIV system based on a pulse laser and two cameras. Flow vorticity and velocities for tank experiments are measure by either system, while only the pulsed laser is used for air experiments. | |||||||||||||
 |
 |
||||||||||||
| Stereo PIV systems(up: illustration; down: setup) | Continous laser PIV system(up: illustration; down: setup) | ||||||||||||
 |
 |
||||||||||||