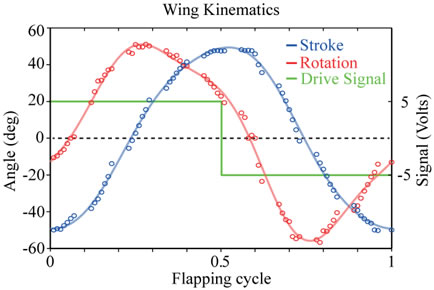
We designed and developed a 2.6 gram electromagnetic actuator operated at tunable resonance frequency. This design is based on wedge-shaped electromagnetic coil generating a driving torque on a rotor embedded with permanent magnets. Additional permanent magnets are used to generate virtual springs, supply a restoring torque to the rotor and creating nonlinear system stiffness. The following two figures are wing kinematics and mean lift measurements made for the flapper operating at resonance of 70Hz, producing a lift-to-weight ratio of over one. (ICRA'13 papers, available upon request; patent pending)
Frequency response of electromagnetic actuator
Wing stroke and rotation angle measurements.
Vertical force measurements: lift to weight ratio is 1.1 at 24V.
Bio-inspired Sensor & Sensor Fusion Algorithms
We deloped mathematical models for biomimetic sensory system consisting of ocelli, halteres, magnetic compass, and optical flow sensors for the micromechanical flying insect project. The models are developed based on biological principles, analytical models, and experimental data. (TRO paper)
Haltere and ocelli of insect sensors.
In this project, we study sensor fusion for the attitude stabilization of micro aerial vehicles. Following a geometric approach, a dynamic observer is proposed that estimates attitude based on kinematic data available from different and redundant bioinspired sensors such as halteres, ocelli, gravitometers, magnetic compass and light polarization compass.The filter performance based on a three-axis accelerometer and a three-axis gyroscope is experimentally tested on a 2-d.o.f. support, showing its effectiveness. Attitude stabilization is performed based on a feedback scheme with dynamic estimation of the state. (AR paper)
Sensor fusion algorithm.
Bio-robotics Laboratory
School of Mechanical Engineering,
Purdue University,
West Lafayette, IN 47907
Email: xdeng@purdue.edu Phone: 765-494-1513 Fax:765-496-7537