Boxfish with multiple fins can maneuver in confined
spaces with a near zero turning radius, and it has been found that its unusual boxy shape is responsible for a self-correcting mechanism that makes its trajectories immune to water disturbances. Miniature underwater vehicles with these characteristics have a variety of applications, such as environmental monitoring, ship wreck exploration, inline pipe inspection, forming sensor networks, etc. This project focus on the design of a robotic boxfish. Tail fin hydrodynamics have been investigated experimentally using robotic flapper mechanisms to arrive at a caudal fin shape with optimal-shape-induced flexibility. Fluid simulation studies were utilized to arrive at the body shape that can result in a self-correcting vorticity generation. (TRO paper)
First generation robotic fish swim test
Fin Hydrodynamics
Body shape induced passive stability due to vortex shedding (left); Fin hydrodynamics (right).
Sensory Feedback Control and Trajectory Tracking
we developed a dynamic model for a robotic boxfish and performed feedback control for trajectory tracking. The control algorithm relies on a robust and computationally efficient sensory feedback, based on a complementary filter fusing data from different Inertial Measurement Unit (IMU) sensors. The almost global stability of the attitude estimator guarantees convergency and robustness to noise and parameters uncertainties. The video and graph below shows tracking of a sinusoidal roll angle. The video to the left demonstrate the effectiveness of the combined roll/yaw coupling on the maneuveribility of the robot, where the freely swimming robot was controlled to perform banked turns to circle the tank in loops. (ICRA paper)
Robotic fish tracking a banked turn in tank.
Second generation fish robot tracking a sinusoidal roll angle trajectory. (left) measurements; (right) video
Bio-robotics Laboratory
School of Mechanical Engineering,
Purdue University,
West Lafayette, IN 47907
Email: xdeng@purdue.edu Phone: 765-494-1513 Fax:765-496-7537

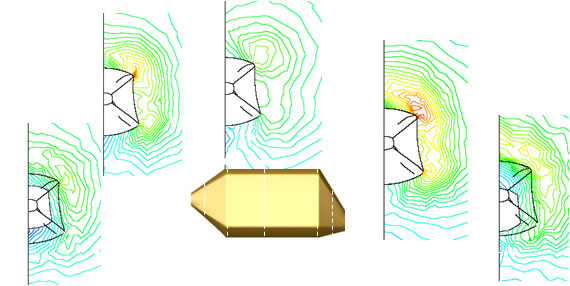
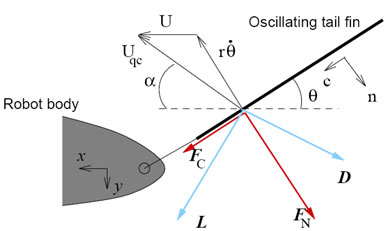 Fin Hydrodynamics
Fin Hydrodynamics