We work in the field of Biologically Inspired Robots, an emerging multidisciplinary field dedicated to the next generations of robotics that are inspired by nature.
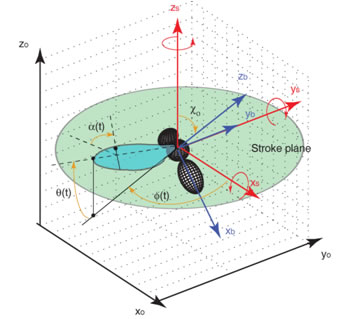
We use robotics theories and experiments to investigate the locomotion principles of biological systems (e.g. flying insects, birds, and fish) to decode their secrets of highly maneuverable, stable, and energy efficient movement.
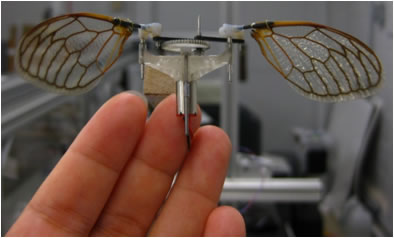
These discoveries, in turn, help us develop next generation bio-inspired robots which can efficiently navigate in air, land, and sea. Such robots can then be used for their greater adaptivity and robustness in performance compared to conventional robots in confined, complex, and unstructured environment. |