
A.1 Motivations and Control Issues
The linear motor driven positioning system has the potential for widespread use in manufacturing and other industrial applications because of its high-speed/high-accuracy potential. Such a nice property is gained by eliminating mechanical transmission. However, it also loses the advantage of using mechanical transmission; gear reduction reduces the effect of the table dynamics on the motor and mechanical transmission provides the necessary stiffness for processes such as machining. As a result, there is a strong dynamic interaction between the table dynamics and the linear motor. Control of the linear motor thus becomes more difficult because of the uncertainties in the table dynamics such as the variation of the inertia (e.g., uncertain payloads) and disturbances (e.g., cutting forces in machining). Furthermore, the stiffness of the axis in the motion direction is entirely determined by the servo controller since a linear motor has zero static stiffness; active control is therefore necessary for proper functioning. The linear motor itself may be subject to some nonlinear effects such as force ripple. In order for a linear motor driven table to function and to deliver its promising high-speed/high-accuracy potential, a controller which can achieve the required high accuracy, in spite of the uncertainties in the table dynamics and the nonlinear effects in the linear motor, has to be employed. This project is to apply the proposed ARC to address the control issues associated with the linear motor table because of its high performance and strong robustness to model uncertainties.
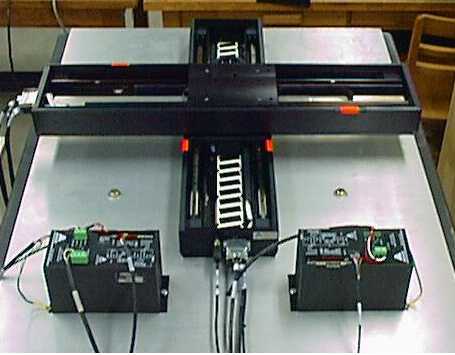
A two-axis high precision X-Y table driven by two different types of leading edge linear motors manufactured by Anarod company has been set-up at the Motion Control Laboratory of the School of Mechanical Engineering (Fig.3). Each axis of the table can move at a speed more than 1.5m/s with a position resolution less than 1 micron. The entire system is controlled by an advanced dSPACE products based control platform (Fig.4). A Pentium PC functions as the user interface. Currently, experiments have been performed on the control of the upper axis, which is driven by an epoxy core linear motor. Comparative experimental results verify the high performance nature of the proposed algorithm and the strong performance robustness to parameter variations and disturbances.
Fig.3 A Linear Motor Driven Precision X-Y Table
Fig.4 Linear Motor Experimental Set-up
A.3 Experimental Demonstrations and Results
Point-to-Point Trajectory with Load: Video Results Point-to-Point Trajectory without Load: Video Results
Reference:
L. Xu and B. Yao, "
Output
feedback adaptive robust precision motion control of linear motors,"
Automatica (accepted in 2000).
L. Xu and B. Yao, " Output feedback adaptive robust control of linear motors with negligible electrical dynamics ," to appear in the 2000 ASME International Mechanical Engineering Congress and Exposition (IMECE) (Finalist of the Best Student Paper Competition of the ASME Dynamic Systems and Control Division (DSCD))
L. Xu and B. Yao, "Adaptive robust precision motion control of linear motors with ripple force compensation: Theory and Experiments", Proceedings of IEEE Conference on Control Applications, pp373-378, 2000 (Winner of the Best Student Paper Competition)
L. Xu and B. Yao, "Adaptive robust precision motion control of linear motors with fast electrical dynamics: theory and experiments", Proc of American Control Conference, pp2583-2587, 2000. (Full-Version [PDF])(Conference Version [PDF])
Bin Yao and L. Xu, "Adaptive robust control of linear motors for precision manufacturing," The 14th IFAC World Congress, Vol. A, pp25-30, 1999. (The revised full version will appear in the International Journal of Mechantronics [PDF])
Piezoelectric actuators are finding increasing application in areas demanding high precision and fast response. Properties of the actuators that make them desirable for such demanding applications are their low mass, low heat generation, non-magnetic nature. The low mass implies that the response of the actuators to a given control input is very quick. The low heat generation enables the actuators to achieve high positioning accuracy over extended periods of operation. The non-magnetic nature makes such actuators immune to any electromagnetic disturbance that might affect the positioning accuracy. Moreover, the physical nature of the drive being linear implies that the errors like play and backlash that are unavoidable in conventional geared drives can be eliminated. Such errors are a major consideration particularly when large capacity drives are being used for motion control.
Some applications of piezoelectric devices and actuators are in disk drive head positioning and disk drive testing, micro-stabbers and micro-pipettes in cellular biology, optical lens and mirror positioning, micromanipulation in fabrication in semiconductor industries (one unconventional use of piezoelectric crystals is in cigarette lighters!).
To study fundamental problems associated with the control of piezoelectric actuator, a nanopositioner stage driven by a piezo-electric actuator shown in Fig.5 has been set-up. The stage has a built-in integrated capacitive sensor with a resolution less than 1 nanometer. The piezoelectric actuator is powered by a high accuracy voltage amplifer and will be controlled through a fast dSPACE system.
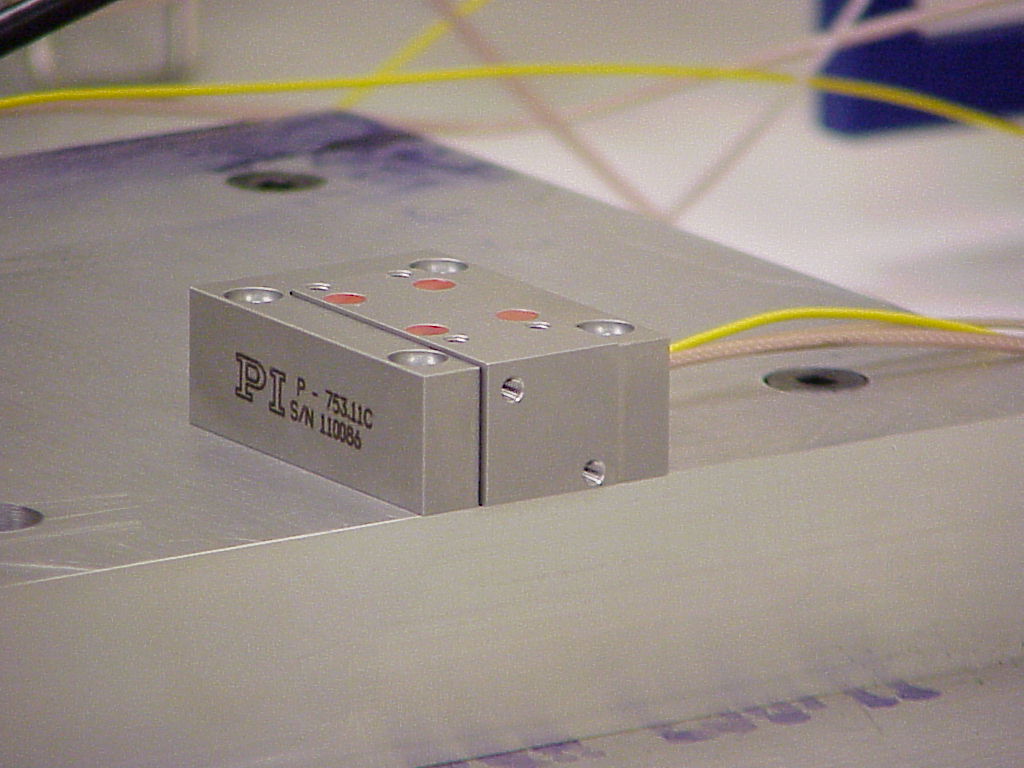
Fig.5
Nanometer Positioning Stage
The objective of this project is to study fundamental principles for machining problems and develop corresponding high-performance robust high-speed/high-accuracy motion and/or force control algorithms by analysis, simulations, and experiments. The proposed ARC has been combined with digital feedforward control to achieve high performance motion control of machine tools. The proposed scheme is implemented on a MATSURA 510VSS high-speed vertical machining center. Experimental results show that the proposed scheme achieves a better tracking performance than the existing linear control techniques such as disturbance observer, and is more flexible in dealing with friction and other discontinuous disturbances. The final tracking errors of both X and Y axis for tracking a circle with a radius of 2cm and a feed rate 7m/min are within 2 microns, which is in the order of the encoder resolution of 1 micron.
Reference:
Bin Yao, M. Almajed, and M. Tomizuka, "High Performance Robust Motion Control of Machine Tools: An Adaptive Robust Control Approach and Comparative Experiments," IEEE/ASME Trans. on Mechatronics, Vol.2, No.2, pp62-76, 1997. Part of the paper appeared in the invited session on Advances in Mechanical Motion Control, 1997 American Control Conference, pp2754-2758.
Bin Yao, M. Almajed, and M. Tomizuka, "General High Performance Adaptive Robust Motion Control of Machine Tools," IEEE/ASME Conf. on Advanced Intelligent Mechatronics, 1997.
G. T.C. Chiu and Bin Yao, "Adaptive Robust
Contour Tracking of Machine Tool Feed Drive Systems-a Task Coordinate Frame
Approach," American Control Conference, pp2731-2735, 1997.

{kind=link}
{kind=link}