Current projects include developing low-cost autonomous systems for ground and underwater applications. Dr. Mahmoudian and her team are focused on developing a rigorous framework for analyzing, controlling, and navigation of autonomous vehicles for different applications in harsh dynamic environments. The efforts will advance efficient collaborative behavior of autonomous vehicles.
 Surface Water Observation
Surface Water ObservationThis area of interest focuses on observation at the water surface level. To achieve this goal, it is necessary to equip Autonomous Surface Vehicles (ASVs) with the tools for long-term operation and energy autonomy to serve as gateways between air and underwater domains. To navigate through complex and dynamically changing environments, ASVs must possess dynamic maneuvering capabilities. In this regard, we are interested in reinforcement learning-based obstacle avoidance systems, which enable ASVs to adapt and react swiftly to unforeseen obstacles, enhancing their operational robustness. Additionally, ASVs can implement vision algorithms, specifically image segmentation techniques, enabling them to make informed decisions by parsing visual data from their surroundings. These capabilities will ultimately pave the way for more sustainable and autonomous underwater and aerial exploration.
 Underwater Exploration
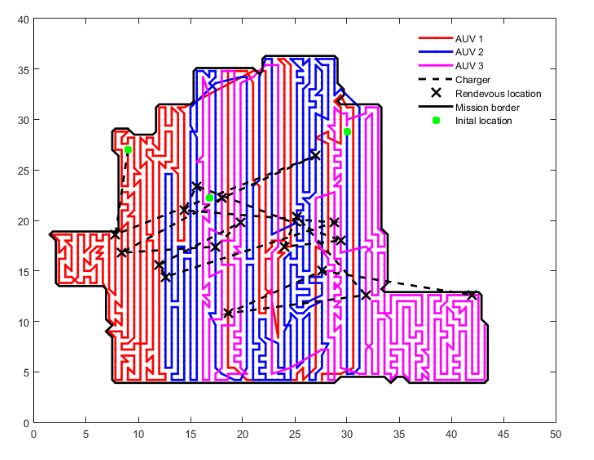
Underwater ExplorationIn the field of underwater exploration, our focus lies on Autonomous Underwater Vehicles (AUVs), which play a crucial role in scientific research and marine operations. Our primary objective is to extend mission durations and enable precise underwater tasks through the application of advanced control techniques. The persistent autonomy of AUVs is essential for handling extended and complex missions, for this, AUVs need to be endowed with underwater docking capabilities. This feature allows AUVs to recharge or exchange payloads, thus extending their mission duration and versatility. To enhance navigation efficiency in dynamic environments, we employ multi-vehicle mission planning and real-time motion algorithms to adapt to changing conditions, enhancing their operational effectiveness. Underwater perception technologies, including image segmentation, magnetic surveying, and target detection, provide crucial insights into the surrounding environment. Integrating these technologies into AUVs ensures robust performance, enabling them to execute intricate missions with precision and reliability, ultimately advancing our understanding of the underwater world.
 Aerial Monitoring
Aerial MonitoringOur aim in aerial monitoring is to enable persistent operation and comprehensive area coverage. This is achieved through seamless coordination with Autonomous Surface Vehicles (ASVs) and the optimization of planning and control strategies. ASVs serve as support platforms, facilitating extended missions and efficient data collection. To ensure maximum coverage, we employ advanced area coverage planning techniques, allowing aerial vehicles to systematically survey vast regions. Integrated autonomous charging capabilities ensure uninterrupted mission execution by enabling vehicles to replenish their energy resources as needed. Image segmentation plays a critical role in processing visual data, enhancing its relevance. Furthermore, we apply swarm control principles, enabling multiple aerial vehicles to work simultaneously as a unified force, thereby increasing the effectiveness of aerial monitoring missions.
 Persistent Autonomous Operation
Persistent Autonomous OperationThe aim is to develop theoretical, computational, and experimental tools for the long-term operation of a network of autonomous vehicles in complex environments. The key is lowering deployment and operating costs, while also increasing efficiency, endurance and persistence. The application is for air, ground, and sea robots.
 Co-Robots to Engage Next Generation of STEM Learners
Co-Robots to Engage Next Generation of STEM LearnersThe aim is to broaden interest and participation in STEM fields through high-interest themes, meaningful contexts, and hands-on activities that engage both the analytical thinking and the integrative design side of the brain. Glider for Problem-solving and Promotion of Interest (GUPPIE) has been developed as a low-cost interdisciplinary pedagogical platform. This research project will study the effectiveness of application-based robotic activities for engaging underrepresented students in STEM.
 Low-Cost Underwater Glider Fleet for Littoral Marine Research
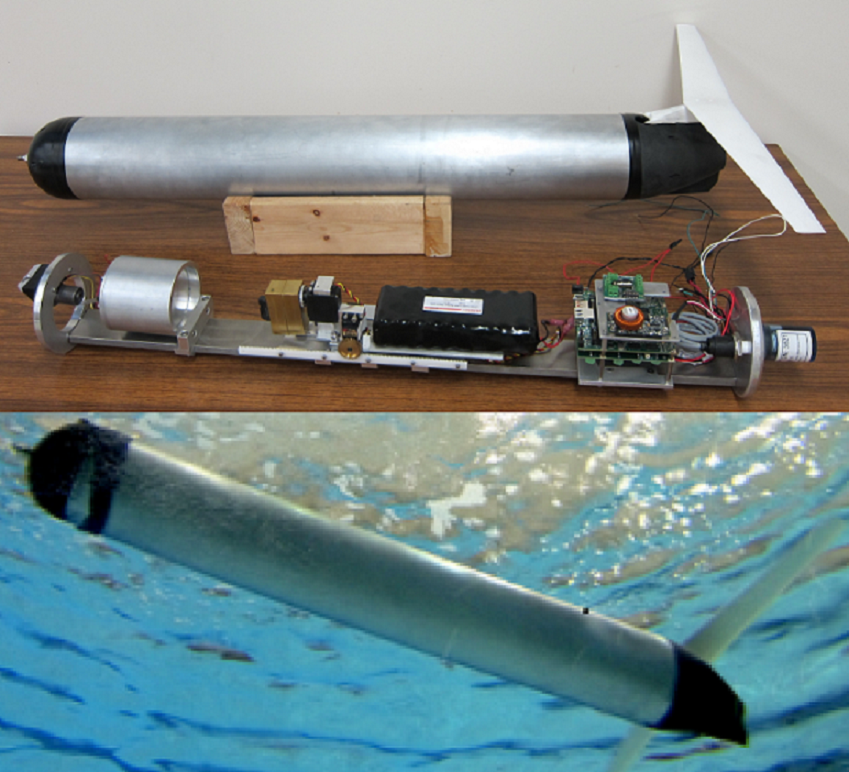
Low-Cost Underwater Glider Fleet for Littoral Marine ResearchThe specific goals of this project are twofold. The first goal is to design and fabricate a fleet of low-cost highly maneuverable lightweight underwater gliders (UGs). The second goal is to evaluate the capability of the single and multiple developed UGs in littoral zones. The developed UG named ROUGHIE (for Research Oriented Underwater Glider for Hands-On Investigative Engineering) will be smaller in size, lighter in weight, and lower in price than legacy gliders.
 Advance Underwater Sensing
Advance Underwater SensingThis project is focused on developing an autonomous underwater pipeline monitoring navigation system that enables accurate AUV mapping of the pipeline and surrounding area, while dramatically reducing the time and cost of inspections. In collaboration with the Michigan Tech’s Great Lakes Research Center (GLRC), an autonomous motion-control and navigation algorithm will be developed for an AUV – The Ocean Server IVER3 – to track long linear features such as underwater pipelines.
 Analysis of Mobile Haulage Equipment Operating Dynamics
Analysis of Mobile Haulage Equipment Operating DynamicsIn order to improve the safety and working environment of mining workers, smart detection systems need to be developed and discussed. The dynamic models and databases for all types of mining machines are the first step to establishing a detection system. The aim of this project is to determine the vehicle kinematics and dynamics for the majority of mobile haulage equipment.
 Autonomous Mobile Microgrids
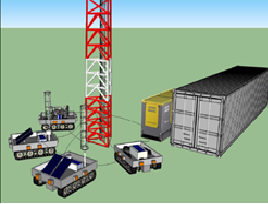
Autonomous Mobile MicrogridsThe aim is to integrate vehicle robotics, intelligent power electronics and electric power assets to create self-organizing, ad-hoc mobile microgrids to provide power to critical need sites. This system will be capable of regulating power flow at a desired voltage and frequency level meeting load demands. It also can adapt to changes in situation, power demands, or generations.

Nina Mahmoudian
Associate Professor of Mechanical Engineering
Purdue University
585 Purdue Mall
West Lafayette, IN 47907
ninam@purdue.edu