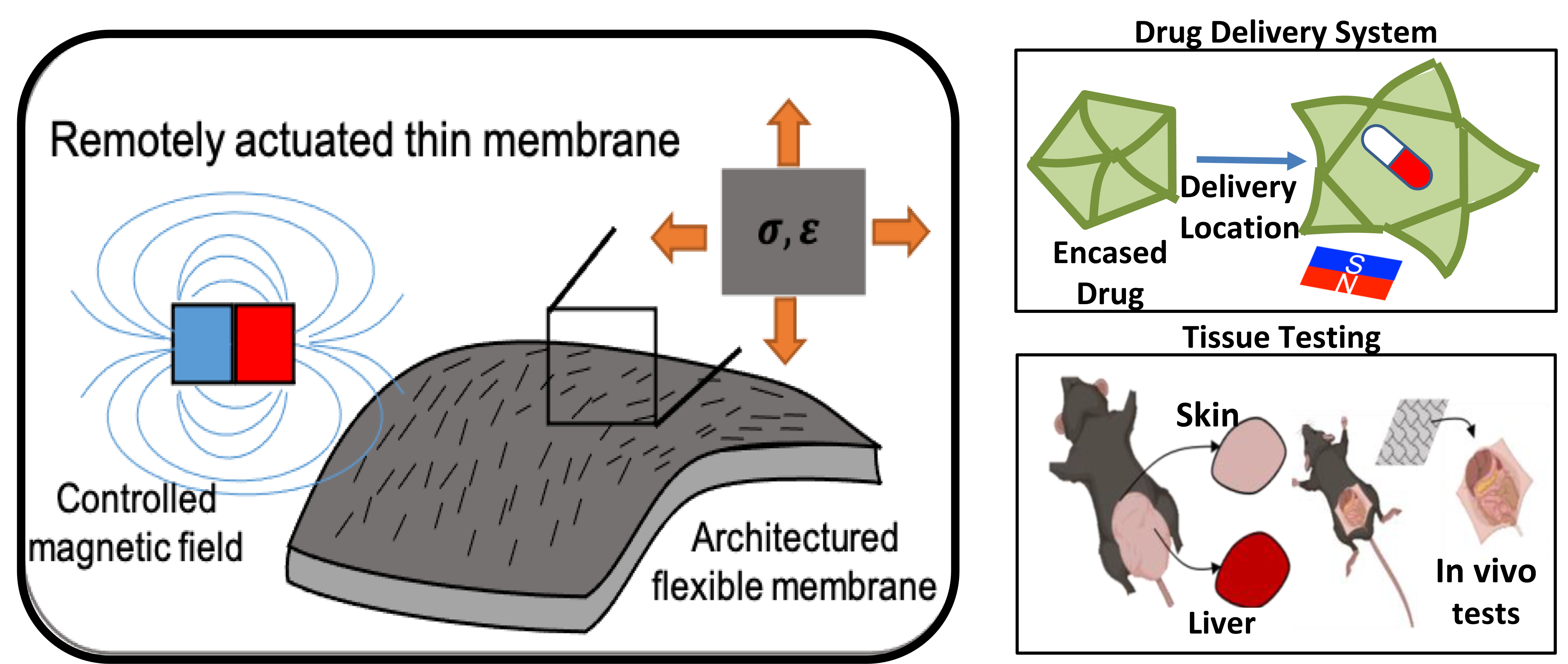
Structures that can be actuated remotely with external stimuli have found wide-spread applications in aerospace, soft-robotics and medicine, to name a few. Remotely actuated structures decrease the interaction of human or machine directly on the site of actuation. These are useful in environments too difficult to replicate or materials too delicate to handle. One such remotely actuatable structure is a Magnetically Responsive Membrane (MRM). These are soft membrane that can undergo large scale deformations under an external magnetic field. These particular MRMs are also programmed to have local anisotropies which are seen in many biological bodies like bones, wings, plants etc.
In this research we focus on nickel flake embedded soft elastomeric composites which can be actuated remotely using external magnetic field. This work particularly deals with mechanical characterization of soft materials. The conventional material characterization techniques for soft materials are mostly limited to biaxial testing. For this case we explore the use of magnetic membranes to remotely introduce loads and deformations on the testing material.
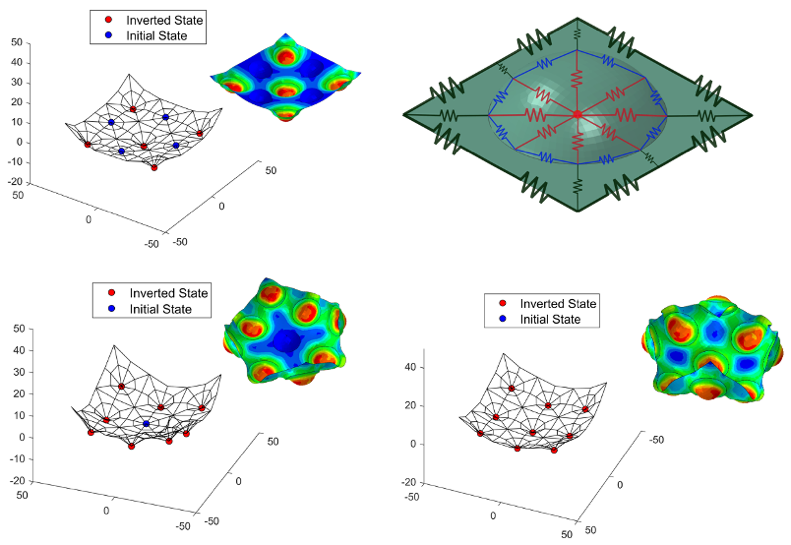
Reconfigurable structures and soft metamaterials have introduced new opportunities for robot design, shape programmability, and embedded sensing. Recently, patterned metamaterials consisting of reconfigurable bistable units have gained interest due to their capability of exhibiting different energy minima, activation path dependency, and influence of local prestress in its global shape. As the unit cells can be reversibly inverted at the local scale, multiple stable shapes at the global scale are generated. These shapes are highly dependent on the unit geometry, inversion sequence, the number of units, and unit spatial distribution, which makes them difficult to analyze, predict and count. Given this, simple yet robust models need to be utilized to predict the final state of the structure, enabling faster analysis and design.
This project focuses on simplifying patterned metastructures using a reduced-order model base on spring lattices. Our model allows us to analyze the global stable states of our metasheet by investigating the interrelations between units and their spatial arrangement and giving a relation between the final shape and the number of units, distribution, and unit cell geometric parameters. We further examine the interaction between units and its effect on the final shape and its role in generating geometrically frustrated stable states. Furthermore, we examine the effect of inversion path and unit interactions in different applications, such as soft multistable actuators, reconfigurable structures, and Ising models. This opens a route for the fast design of multistable soft robots, shape targeting in soft metamaterials, and analysis of complex physical systems.
Reconfigurable origami expands the design space for adaptive structures. However the many folding pathways makes it difficult to control the trajectory. Multistable origami systems simplify the control problem by encoding the desired shape in energetically favorable minima. These systems rely on flexible and stretchable facets to resolve geometric frustration, which unfortunately exclude materials that cannot accommodate large strains, including electronics based on brittle semi-conductors. Traditional origami methods have been used to achieve multiple stable states without facet stretching, but rely on precise relative tuning of the crease stiffness. By relaxing the requirement that the system be folded from a flat sheet of paper, so called “Non-Euclidian Origami” has achieved multiple stable states with the use of a single torsional spring. Specifically, for a 4-facet origami system, it has been shown that these stable states lie on two disconnected branches.
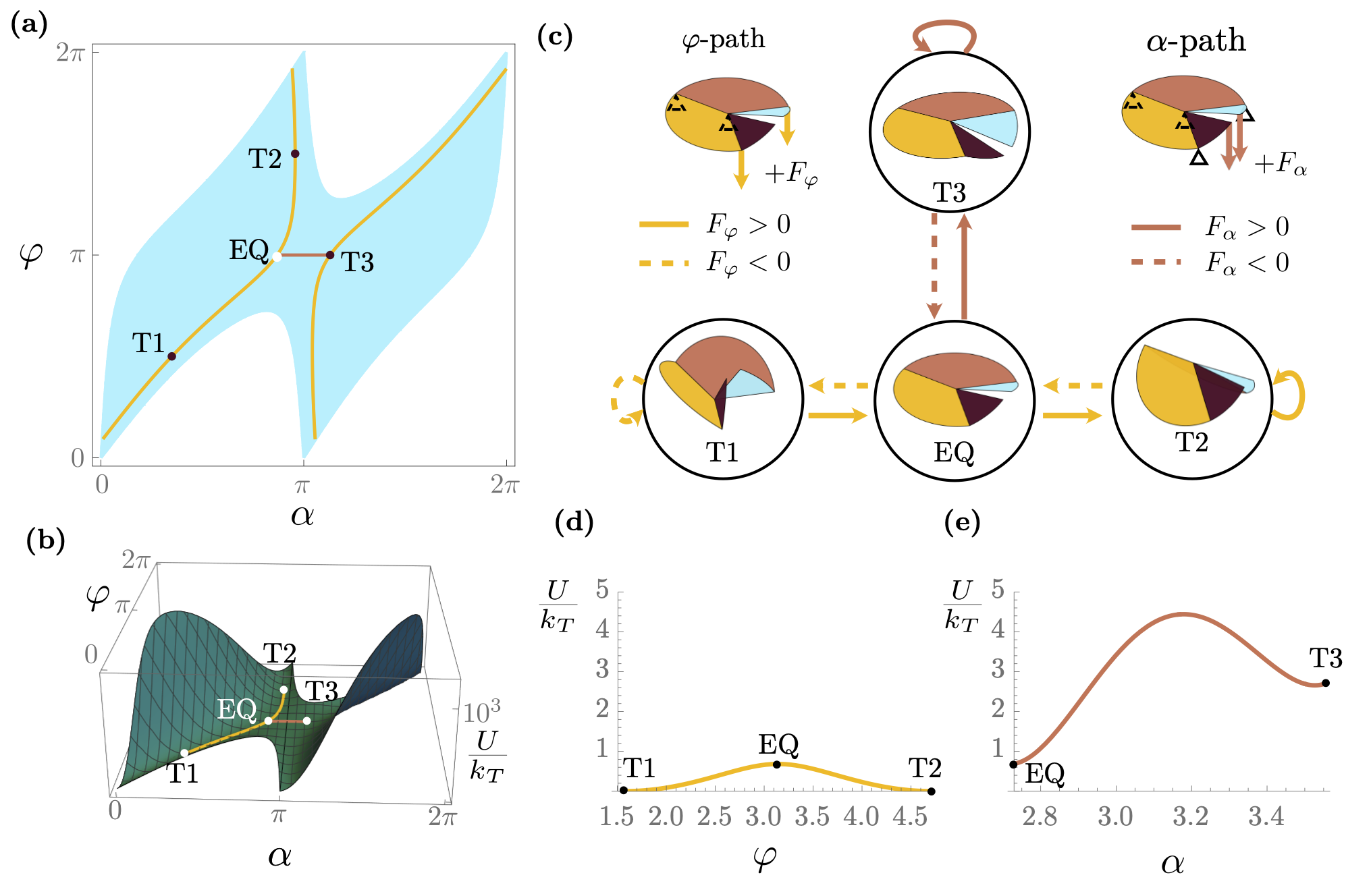
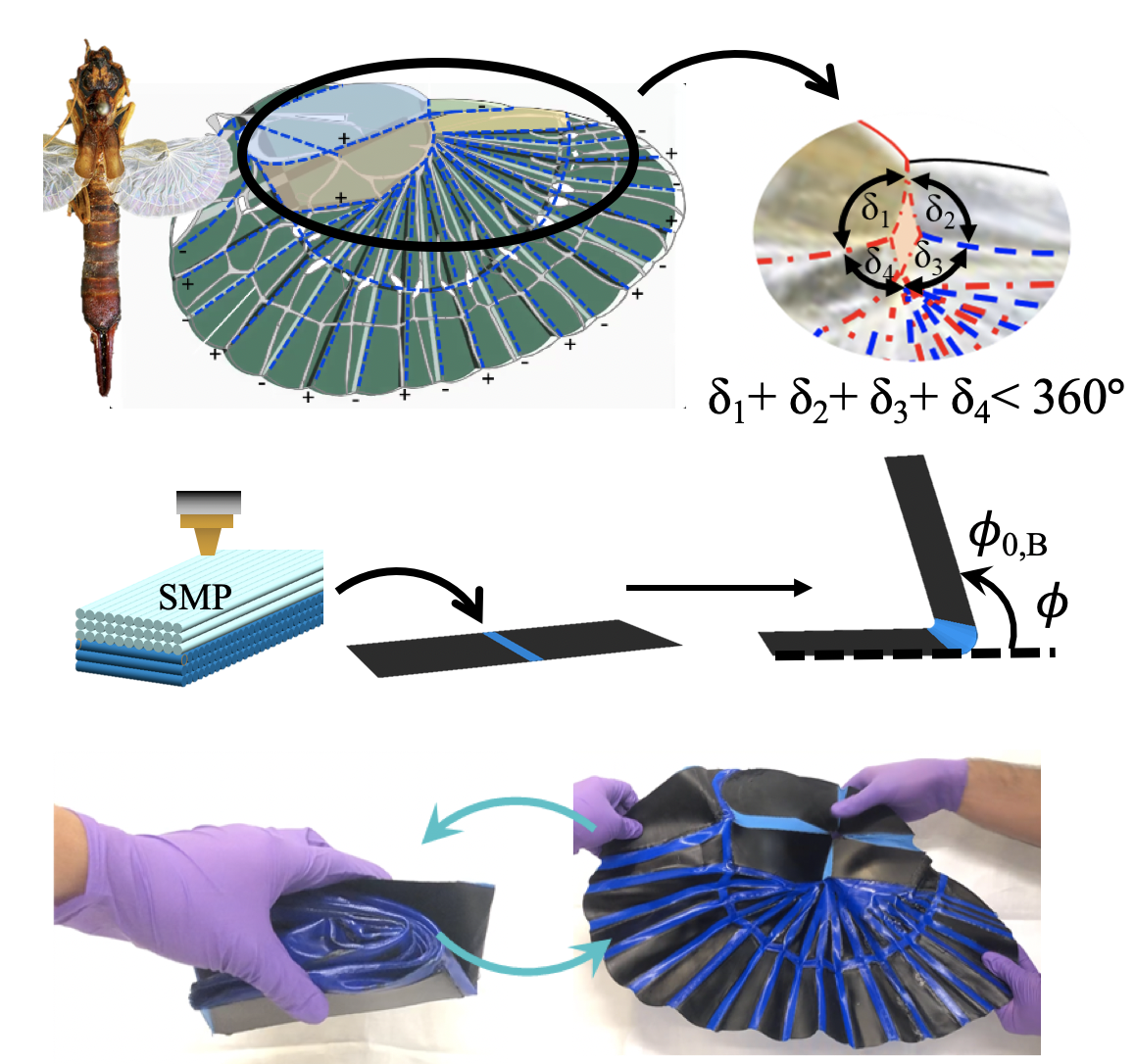
In this project, we take a 4-facet origami system and permit crease stretching in addition to bending to enable the continuous folding between these otherwise disconnected branches. The crease stretching, or Spring Origami, is inspired by the wing deployment mechanism in the Earwig. Using spherical geometry, we develop a mapping between the kinematic space and the energetic space of the 4-facet origami system. We show that a single 4-facet origami unit can exhibit up to 3 stable states, with 2 distinct folding pathways between each state. This analysis provides a simple analytic method to predict which equilibrium angles which result in mono-, bi-, tri-stable behavior. Ultimately, we lay the groundwork for controlling the folding pathways and stable shapes of stiff reconfigurable origami systems without additional control complexity.
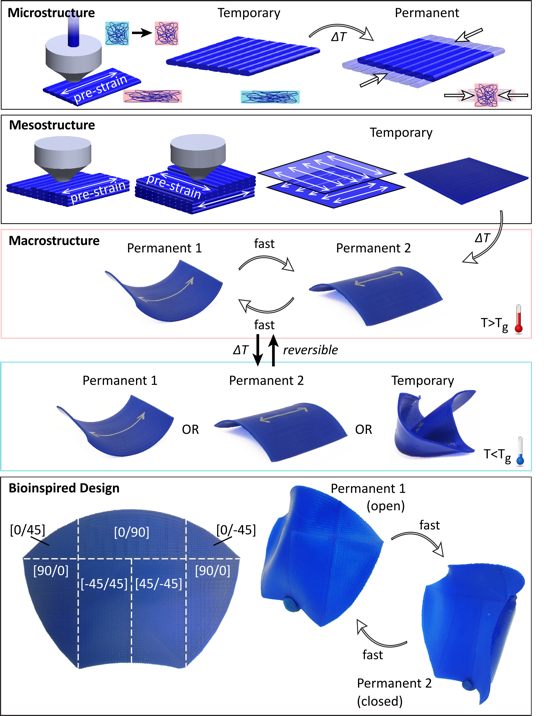
4D printing introduces the dimension of time to typical 3D printing through advanced material properties and/or processing techniques. A 4D printed structure exhibits programmed shape change after printing. This shape change is triggered by an external stimulus, such as changes in temperature, humidity, or pH. While the use of 3D/4D printing enables complex geometries, this type of shape change is typically slow and requires reprogramming. In this project, we aim to use 4D printing to create structures with fast, reversible shape change and complex stable shapes.
We use a bioinspired hierarchical architecture in combination with polymer shape memory to 4D print switchable multistable structures (SMS). By carefully controlling the temperature settings of the print process, we use extrusion-based fused deposition modeling (FDM) 3D printing to program directional shape memory during the printing itself. Above the polymer’s glass transition temperature, SMS become compliant and are multistable with fast, reversible shape change between multiple remembered shapes. Below the glass transition temperature, the multistability is switched off, and the SMS are stiff and frozen in the current state. This enables complex, bioinspired designs with a simple, accessible manufacturing method.
Origami inspired structures requiring external manipulation to fold or unfold can introduce challenges such as automation, communciation, and control in remote locations. Additionally, the challenge of transporting and deploying structures at relative length scales for applications in space orbit, or minmally invasive suregery increase when also includuing actuators, thus self-folding structures have insied engineers to leverage the efficient packing ability of auonmous self-folding origami transofmrations from the flat reference configurations.
A methodology for encoding and adapting the stable shapes of a class of bioinspired spring origami structures post fabrication is developed. Combining elastic prestraining through fabricating bilayer creases which morph upon thermal activation, and crease stretching inspired by the Earwig wing's bistable central mechanism allows for programmed self-folding, the ability to adjust initial configurations, and reconfiguration thereof. Multimaterial 3D printing/4D printing is used to leverage the shape memory effect (SME) of shape memory polymers (SMP). This allows for extruding directionally dependent polymer chains that make up the active crease cross-section at high temperatures in energetically unfavorable configurations and forced to freeze rapidly once the material contacts the print bed thus encoding the prestrain. The anisotropy characteristics in the bilayer induce a local curvature in the fold which can be controlled through the length of activation time owing to the SME in the bilayer. The active crease enable shape change and tunable stiffness over continuous and repeated activation and thus enabling control of the global initial shape and topology of the energy landscape. Further, the crease prestraining method is used to fabricate a biomimetic Earwig wing with a complex crease pattern exhibiting stiffening in a large surface area. The presented work provides a system for encoding prestrain in self-folding origami, the multistability of which is adaptable post fabrication.
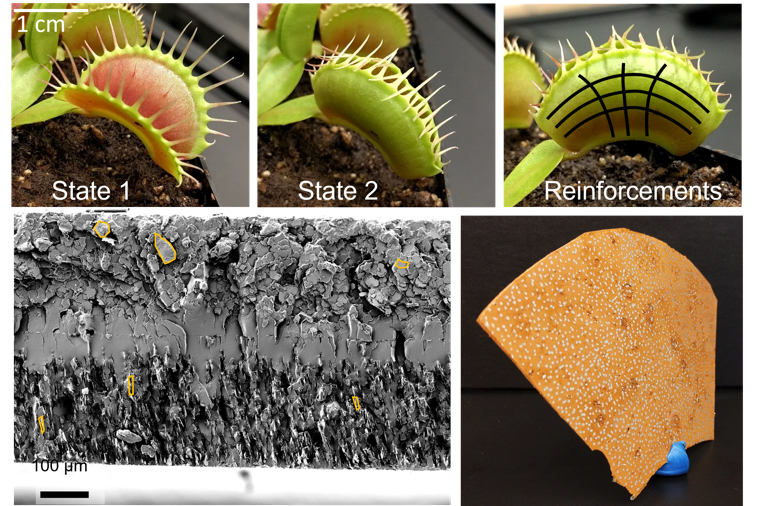
Many biological structures achieve extraordinary functionalities via hierarchical material architectures. One example is the Venus flytrap, which can snap its leaves closed in less than one second in order to capture prey, despite having no muscular or nervous systems. This fast motion is possible because the leaves are composed of a bilayer of cells with spatially distributed, contrasting pre-stress fields. By carefully programming the microstructure of composite materials, in combination with the meso and macro level structural properties, we can mimic this hierarchical architecture in synthetic structures.
We use a cast composite system consisting of a thermoset epoxy matrix with magnetically responsive reinforcing platelets to manufacture bilayer shells with spatially distributed reinforcements. The platelets are oriented and aligned using rotating magnetic fields during curing. Due to the platelets’ anisotropic properties, this process results in spatially varying pre-stress fields and resulting deflections. The bilayer architecture enables bistability. The resulting bioinspired stable shapes and geometries are unattainable with conventional manufacturing and material systems. We explore how to design and model these types of structures, as well as how to achieve morphing on different time scales.
