Objective
Designing HUB-CI model to optimize collaborative e-Work
- Integrated tools (both software and hardware) to support multi-dimensional collaboration
- Distributed teams of experts controlling centralized telerobots with collaborative intelligence
- Prevent conflicts and errors in the complex system
Methodology
- HUB-CI model for collaboration support infrastructure of collaboration lifecycle management
- Smart command aggregation by collaboration support agents
- Collaborative insights management and consensus decision-making support
- Conflict and error detection and prevention network deployed in the system
Applications
|

|
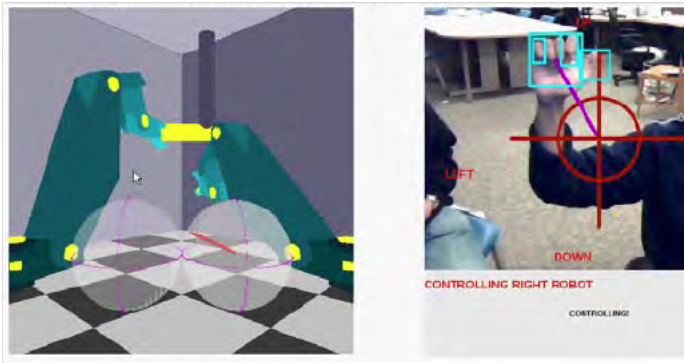
| Hand Gesture collaboratively controlled Nuclear Decommissioning |
Collaborative Design and Prototyping |
Sample Publications
Hao Zhong , Juan P. Wachs & Shimon Y. Nof (2013) A collaborative telerobotics network framework
with hand gesture interface and conflict prevention, International Journal of Production Research, 51:15, 4443-4463, DOI:
10.1080/00207543.2012.756591
Contact
Hao Zhong (zhong11@purdue.edu)
|