Methodology
Food security is an essential challenge for society, especially in the face of climate change and increasing world population. The food security challenge is addressed by this project, which aims to develop cyber-collaborative design and control algorithms and protocols for agricultural robotic systems (ARS). The ARS is designed to monitor, detect, and respond to different types of plant stresses to ensure reliable quality and productivity. This ARS cyber-physical system involves various agents: human farmers and farm workers, agricultural scientists and experts, agricultural autonomous robots and drones, and cyber-physical environments, including sensors. These agents must collaborate intelligently to overcome agricultural production and crops' unstructured and ever-changing conditions.
This project addresses the challenges of food security with real-time AI-based collaborative robotic automation. We develop Computational models for harmonizing telerobotic and human control/decision-making with agricultural robots and drones.
Keywords: cyber-collaborative agricultural robots, disease monitoring and detection, disease treatment, food security
Recent Organizations involved: BARD, Volcani Institute, University of Maryland, companies.
Applications
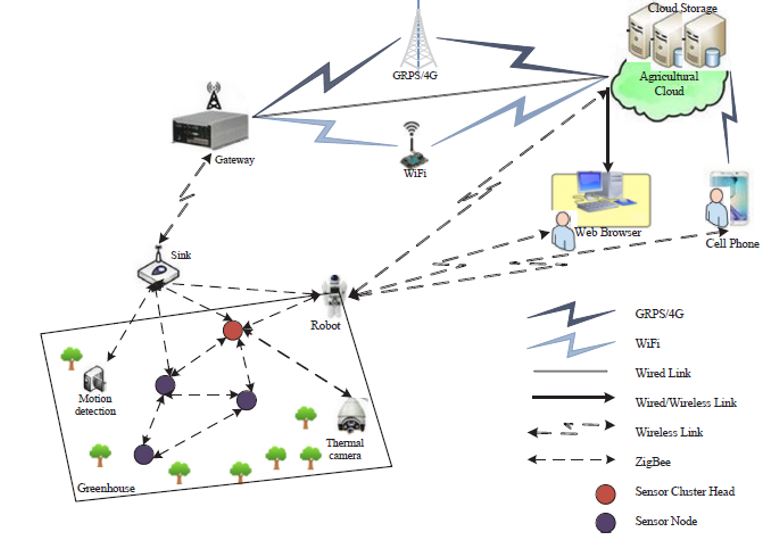
- Agricultural Cyber Physical System for Monitoring, Detecting and Responding (Source: Guo et al., 2018)

- Collaborative remote teleoperation of robot
Publications
Dusadeerungsikul, Puwadol Oak, Shimon Y. Nof, Avital Bechar, and Yang Tao. Collaborative Control Protocol for Agricultural Cyber-Physical System. Procedia Manufacturing, ICPR-25, Chicago, IL August 2019.
Dusadeerungsikul, Puwadol Oak, and Shimon Y. Nof. A collaborative control protocol for agricultural robot routing with online adaptation. Computers & Industrial Engineering (2019).
Guo, Ping, Puwadol Oak Dusadeerungsikul, and Shimon Y. Nof. Agricultural cyber-physical system collaboration for greenhouse stress management. Computers and electronics in agriculture 150 (2018): 439-454.
P.O. Dusadeerungsikul, S.Y. Nof, A. Bechar, and Y. Tao. Collaborative Control Protocol for Agricultural Cyber-Physical System. Procedia Manufacturing, ICPR-25, Chicago, IL August 2019.
Ajidarma, P. and Nof, S.Y. Collaborative Detection and Prevention of Errors and Conflicts in an Agricultural Robotic System. Studies in Informatics and Control, 30(1), 19-28, 2021.
Dusadeerungsikul, P. O., & Nof, S. Y. A Cyber Collaborative Protocol for Real-Time Communication and Control in Human-Robot-Sensor Work. Int. J. Computers, Comm. and Control, 16(3), 2021.
Sreeram, M., and Nof, S.Y. Human-in-the-loop of Cyber Physical Agricultural Robotic Systems, Int. J. Computers, Comm. and Control, 16(2), 2021.
Dusadeerungsikul, P.O., He, X., Sreeram, M., & Nof, S. Y. Multi-agent System Optimization in Factories of the Future: Cyber Collaborative Warehouse Study. Int. J. of Prod. Res., 10.11.2021. DOI: 10.1080/00207543.2021.1979680; 60(20), 2022, 6072-6086.
Nguyen WP, Dusadeerungsikul P.O., Nof S.Y. Plant stress propagation detection and monitoring with disruption propagation network modeling and Bayesian network inference. International Journal of Production Research. 60(2), 2022, 723-741.
Dusadeerungsikul, P. O., & Nof, S. Y. Precision Agriculture with AI-based Responsive Monitoring Algorithm, Int. J. of Prod. Econ., 2024.
Dusadeerungsikul, O.P., Nof, S.Y., Cyber Collaborative Algorithms and Protocols: Optimizing Agricultural Robotics. Springer Series on Automation, Collaboration, and E-Services (ACES), Vol.15, 2024.
Contact
Churchill Sandana (csandana@purdue.edu)
|