Multistable structures selectively respond to external stimuli and present the opportunity for new, mechanically based systems of sensing, memory, and computation. Instead of a central computer processing all of a system’s data, computation could take place locally at the site of the input. This idea is analogous to reflexes in animals, and responsive motions in plants. Rather than rely on a central nervous systems, the material and structural properties at the site of the stimulus drive selective responses. Here, we explore collocated sensing, memory, and computation in a synthetic metamaterial.
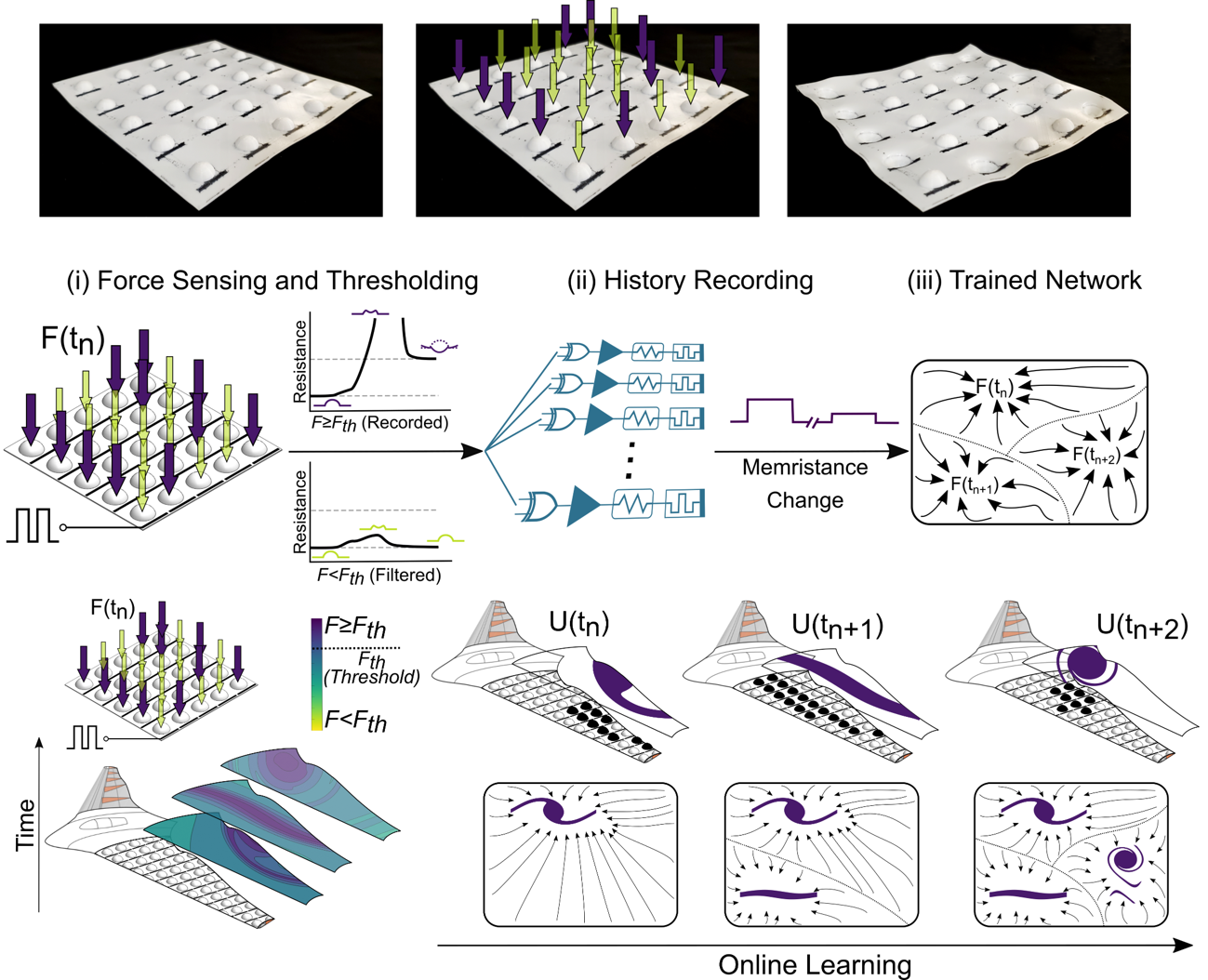
We examine a metamaterial composed of bistable dome unit cells. With close spacing, the interactions between dome inversions drive hierarchical multistability, with global states dependent on the inversion history. Inversion patterns also influence the global mechanical properties of the metamaterial. By incorporating piezoresistive strips at the base of each dome, we demonstrate spatially distributed mechanical sensing with inherent signal filtering and nonlinear amplification capabilities. The unit cells are interconnected with memristors, which allow for memory of inversion patterns. The final memristance values are used to create a simple neural network, demonstrating that a series of patterns may be recorded directly in the metasheet.
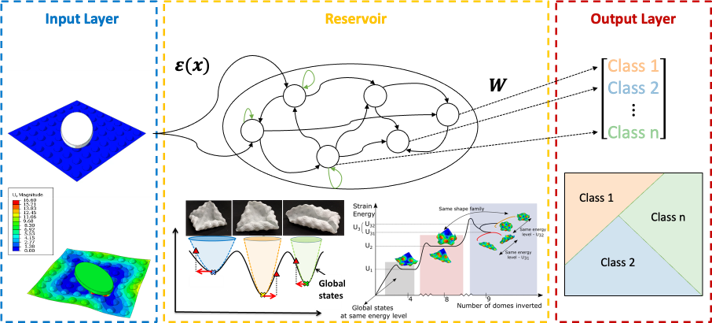
Soft metamaterials have introduced new opportunities to leverage geometrical non-linearities to enable programmability, adaptability, and mechanical computing. Recently, metamaterials have been used to process information due to their capabilities to change its stiffness, adapt to different shapes, and complement traditional computing by introducing interaction with their environment. Dome-patterned metamaterials consisting of patterned array reconfigurable bistable units have gained interest due to their capabilities of exhibiting different energy minima, inversion unit path dependency, hierarchical multistability, shape adaptability, and tunable stiffness. As the unit cell architecture can be reversibly inverted at the local scale, programmable multistable shapes at the global scale are generated due to the local prestress and interaction between each unit. As a result, this metamaterial class can exhibit different global stable states, depending on the unit shape, pattern array, and distance between units. These nonlinear deflections can be utilized to distinguish between different external stimuli, informed only by the mechanical response of the structure.
This project investigates the computational capabilities of multistable metastructures composed of different hybrid pattern dome units that enable strain amplification and sensing. We leverage the nonlinear behavior of each unit cell, the mechanical interaction between units, and the strain amplification due to a dome inversion, as means to process information, by converting nonlinearly separable data to linearly separable data after it interacts with our hybrid metamaterial. This type of metamaterial can capture unique features for different external stimuli , classify them into different families that present the same characteristics and stablish unique control policies.
Soft robots have attracted significant interest due to their capability to interact, adapt and reconfigure in response to external stimuli. Due to their low modulus constitutive materials, intrinsic safety is embedded in softrobots, allowing them to perform tasks that are nearly impossible with rigid counterparts. Nevertheless, the resulting highly nonlinear response of such materials renders the kinematical prediction and control of soft robots challenging, offer requiring sophisticated sensing and processing state processing algorithms. Leveraging multistability offers exciting opportunities to encode several stable states of soft robots, ultimately simplifying the actuation and control problems.
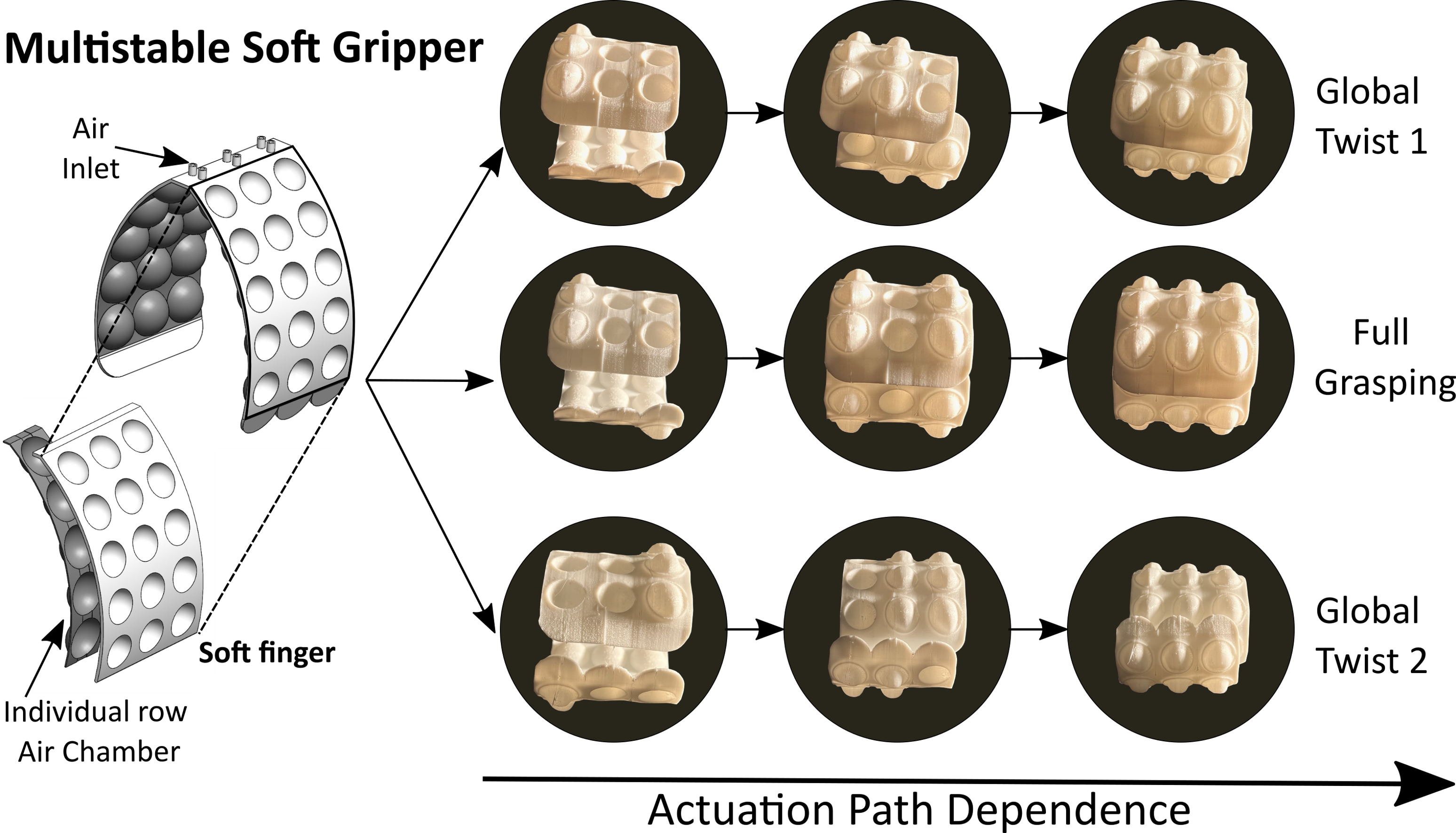
This projects shows different soft robots with encoded multiple stable states that provide a route to shape reconfiguration without closed-loop control. Informed by the mechanics of hierarchically multistable metastructures, we design coexisting states resembling different actuation modes, inspired by nature and regular grippers. Our strategy offers a new route for controlling soft multistable robots exploiting their strong nonlinear mechanics to the designer’s advantage.
