A 3D Vision System For Twisted-Tubular Objects
This system efficiently recognizes and localizes tubular objects jumbled together in piles. The fact that these tubes have highly metallic and specular surfaces adds a certain degree of difficulty to the task, due to highlighting and inter-reflection effects.
In this system, the emphasis has been on increasing the recognition speed to that required for practical industrial applications. We have built special hardware to control the overhead structured light scanner in order to achieve scan times of less than 3 seconds (during which 100 laser stripe images are acquired and assembled together.)

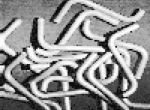
Shown below is an intensity image illustrating a typical scene on which our system operates:

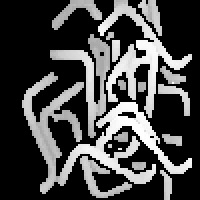
Following the actual scanning stage, triangulation is used to generate a depth map of the scene. A sequence of processing steps are then performed on this depth map, including thresholding, jump edge detection, and noise removal. The following image shows the resulting range map, which has now been segmented into a set of individual tube fragments:
The individual segmented tube fragments are then thinned in order to generate a set of skeletons. Following an additional noise removal procedure, the surviving skeletons are matched against stored tube models. The final output of the system is a set of complete tube matches (in which enough of the tube has been recognized to completely determine it's 3D pose) as well as a set of partial tube matches (in which enough of the tube has been recognized to allow the robot to grasp a section of the tube, but the complete pose is as yet undetermined.) Completely recognized tubes are immediately picked up and assembled by the robot, while partially recognized tubes must be picked up and placed on a light table for final pose determination using binary vision techniques.
We are pleased with the performance of our system. On any given scan of a random pile of tubes, it generally recognizes between 1 and 4 complete tubes, in addition to 5 to 10 partial tube fragments. The system is currently undergoing refinement by NipponDenso engineers for eventual installation in a high-volume automobile parts production line in Japan.


A. C. Kak and J. L. Edwards, "Experimental State of the Art in 3D Object Recognition and Localization using Range Data," Proceedings of the IEEE Workshop on Vision for Robots, Pittsburgh, PA., pp. 45-54, 1995. [ps, 1.5MB]
Sarah Wang, Robert Cromwell, Avi Kak, Ichiro Kimura, and Michiharu Osada, "Model-Based Vision for Robotic Manipulation of Twisted Tubular Parts: Using Affine Transforms and Heuristic Search," Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, May 1994.

