Model-Based 3D Rigid Objects Tracking
The goal of this work is to develop a visual object tracking system that can give accurate 3D pose -- both position and orientation in 3D Cartesian space -- of a rigid object. Our system tracks a target object by applying a model-based pose estimation algorithm sequentially to the images in the input sequence.
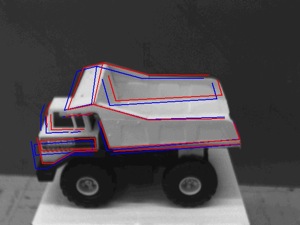
Typically with model-based pose estimation approaches, the features on the target object model are projected on to the input scenes. The correspondences between the projected model features and the scene features extracted from the input scenes are then sought. The pose of the target is estimated by minimizing the corresponding model and scene features.
For estimating the correspondences between the projected model features and the scene features extracted from input scenes, we use a hypothesis generation and verification framework. Our hypothesis-based correspondence search algorithm shows high level of robustness to image sequences with severe occlusion and highly cluttered background.
A few tracking sequences with our model-based tracking algorithm are listed below:


• Youngrock Yoon

Y. Yoon, A. Kosaka, J. B. Park and A. C. Kak, "A New Approach to the Use of Edge Extremities for Model-based Object Tracking", in Proceedings of the 2005 IEEE International Conference on Robotics and Automation, pp. 1883-1889, Barcelona, Spain, April 2005 [pdf]
Youngrock Yoon, Akio Kosaka, Avinash C Kak, "A New Kalman-Filter-Based Framework for Fast and Accurate Visual Tracking of Rigid Objects", IEEE Transactions on Robotics, vol. 24, No. 5, October 2008 [pdf]

QUANTITATIVE ACCURACY ANALYSIS


Station Smooth Truck Smooth
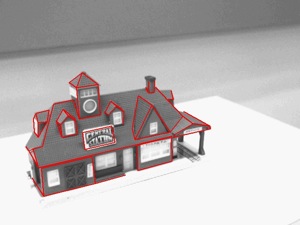

Station 400 Truck 750


Station 450 Truck 800

Station non-smooth Truck non-smooth
QUALITATIVE TRACKING RESULTS


Station-Clutter Truck-Clutter


Station-Occlusion Truck-Occlusion
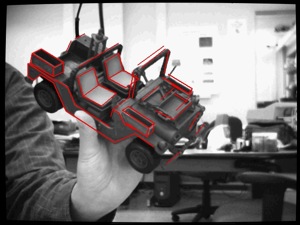

Jeep Camera
Real-Time Tracking Demo Video

