3D Modeling of Optically Challenging Real-World Objects
Project Description
One of the challenges in 3D modeling results from the fact that many real-world
objects have surface materials that are not ideal for optical range sensors. Various surface
materials that cause difficulties in range imaging include specular surfaces, highly absorptive
surfaces, translucent surfaces, and transparent surfaces. Some researchers have tried to
simply do away with such surface-related problems by painting the object or coating the object
with removable powder to ensure that surfaces reflect the light source diffusely. Obviously,
this approach is not desirable and may not even be feasible for real-world objects outside the
laboratory. Thus, this project seeks to develop new methods for generating accurate 3D models
of optically challenging real-world objects using a conventional range sensor.
The following images show some of the results obtained using our method. For technical details of our
method, we refer to the publications at the end of this page.
Object 1: BOWL
Material: Stainless Steel
Number of Range Images Acquired: 3
Range data during false measurement elimination process
The true measurements are displayed with light blue color and the false measurements with dark red
color. Two images visualized from two different viewpoints, labeled as View 1 and View 2, are
accompanied for each step shown in the figures.
Final model visualized from three different viewpoints
Object 2: SEASHELL
Material: Ceramic
Number of Range Images Acquired: 27
Range data during false measurement elimination process
The true measurements are displayed with light blue color and the false measurements with dark red
color. Two images visualized from two different viewpoints, labeled as View 1 and View 2, are
accompanied for each step shown in the figures.
Final model visualized from three different viewpoints
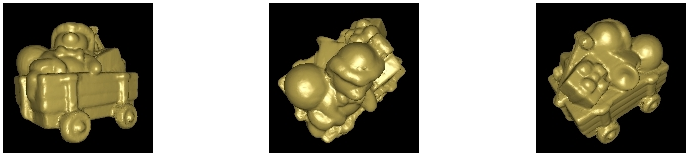
Object 3: BEAR ON TRAY
Material: Ceramic
Number of Range Images Acquired: 40
Range data during false measurement elimination process
The true measurements are displayed with light blue color and the false measurements with dark red
color. Two images visualized from two different viewpoints, labeled as View 1 and View 2, are
accompanied for each step shown in the figures.
Final model visualized from three different viewpoints
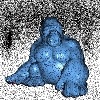
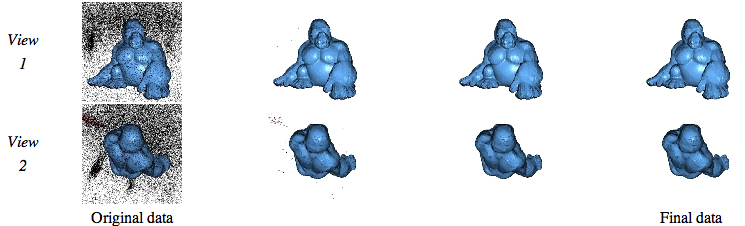
Object 4: GORILLA
Material: Black Plastic
Number of Range Images Acquired: 34
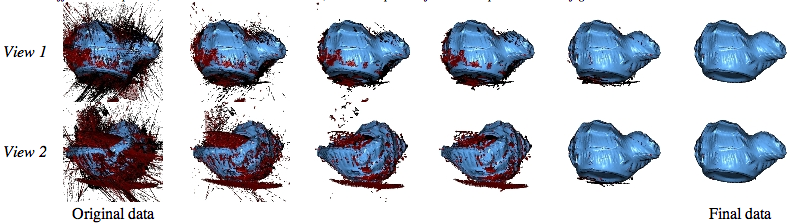
Range data during false measurement elimination process
The true measurements are displayed with light blue color and the false measurements with dark red
color. Two images visualized from two different viewpoints, labeled as View 1 and View 2, are
accompanied for each step shown in the figures.
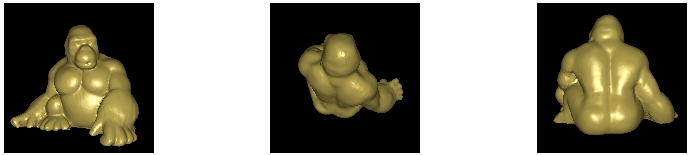
Final model visualized from three different viewpoints
Project Team
Johnny Park
Video
This movie clip shows general steps involved in 3D modeling using range data acquired by a structured-light scanner.
J. Park and A. C. Kak,
"Multi-Peak Range Imaging for Accurate 3D Reconstruction of Specular Objects,"
Proceedings of the 6th Asian Conference on Computer Vision, January 2004.
J. Park and A. C. Kak,
"Specularity Elimination in Range Sensing for Accurate 3D Modeling of Specular Objects,"
in The Second International Symposium on 3D Data Processing, Visualization, and Transmission (3DPVT 2004), September 2004.
J. Park, G. N. DeSouza, and A. C. Kak,
"Dual-Beam Structured-Light Scanning for 3-D Object Modeling,"
Proceedings of the Third International Conference on 3D Digital Imaging and Modeling, June 2001.