Lab 4a Tips: Variable Reluctance Stepper Motor
In-lab
Check your work.
- RT = 8
- SL = π/12 rad
- r ≈ 20 Ω
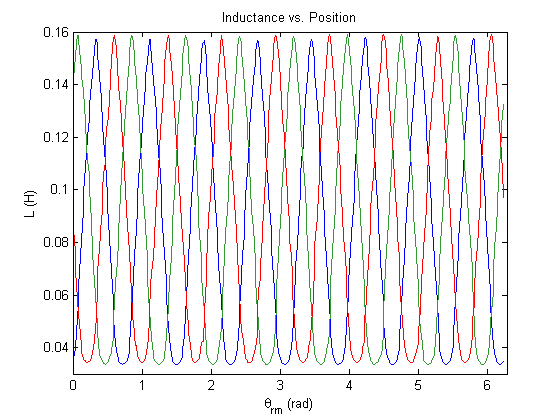
- Sample plot of inductance vs. position.
Post-lab
- The fit8.m file is provided for you in the lab4a folder. As long as this function is in your Matlab working directory you can call it from your post-lab m-file with
fit8(las,qrma);. If you didn't save a copy of fit8.m to your account during lab you can make your own from the code at the end of Appendix 2.
- A short note on how to derive torque equation can be downloaded from [PDF]. This will be useful for completing last part of the Post-lab.
- Use the 'subplot' and 'orient tall' commands to generate your plots. The 'subplot' command lets you place multiple axes on one figure. The command 'orient tall' expands the plot vertically to fill the page when you print.
subplot(3,1,1)
%plot las or Tea vs qrma
subplot(3,1,2)
%plot lbs or Teb vs qrmb
subplot(3,1,3)
%plot lcs or Tec vs qrmc
orient tall
Check your work.
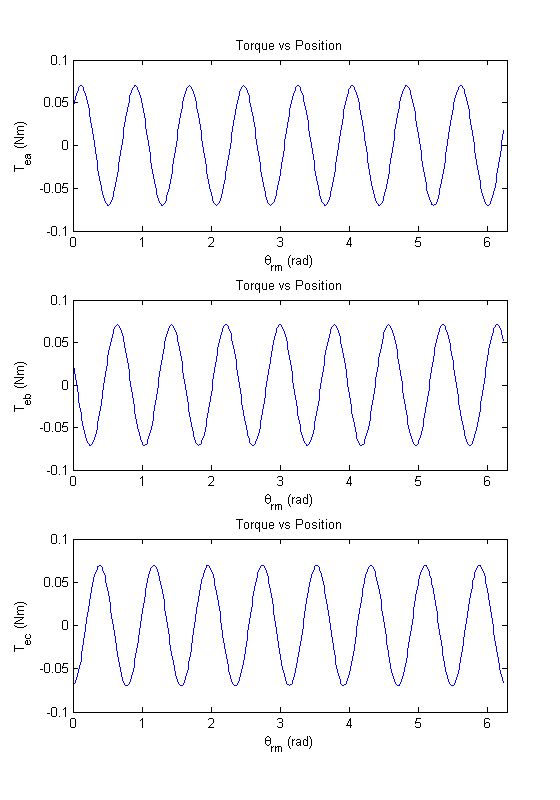
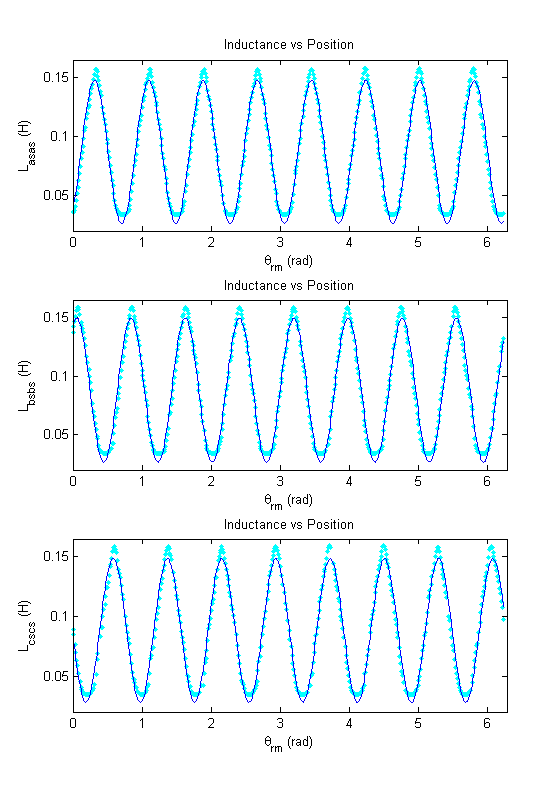
- Sample plot of inductance vs. position with a sinusoidal fit.
- Sample plot of torque vs. position based on sinusoidally fitted inductance. (NOTE: You will have to rederive the torque equations for the inductances as given if question 1)