

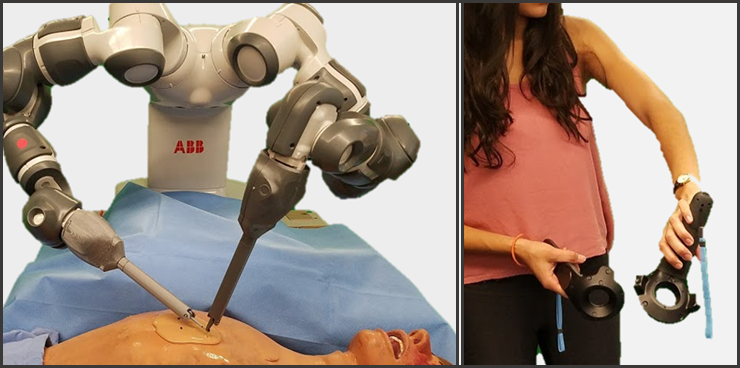
This work demonstrates the adaptation of an industrial robotic system to an affordable and accessible open platform for education and research through rapid prototyping techniques. The ABB YuMi collaborative robot is adapted using a low-cost 3D printed gripper extension for surgical tools. The robot is controlled using an intuitive virtual reality teleoperation system using the HTC VIVE controllers.
The design and assessment of three surgical tools in two mock surgical procedures are showcased in this work. The surgical tasks involved tissue removal with the designed cutting tools, where their effectiveness and completion time are assessed. We conclude from these results, that the perpendicular scalpel tool is preferred for faster completion time, but the scissors are preferred for small tissue removal in terms of effectiveness.
Publication:
Sanchez-Tamayo, N., & Wachs, J. P. (2018, March). Collaborative Robots in Surgical Research: a Low-Cost Adaptation. In Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction (pp. 231-232). ACM.